Download
1 / 10
100 likes | 237 Views
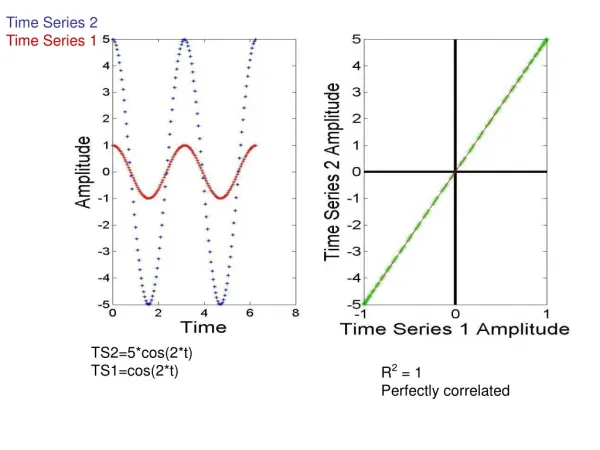
Time 1. thigh. Knee. shank. Angular Kinematics. Segment Angles are ABSOLUTE ANGLES , measured with respect to a (stationary) global vertical or horizontal reference axis.

E N D
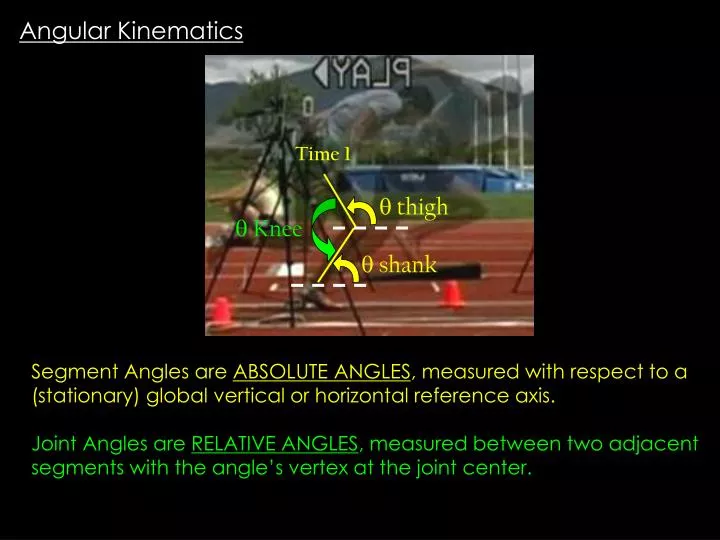
Time 1 thigh Knee shank Angular Kinematics Segment Angles are ABSOLUTE ANGLES, measured with respect to a (stationary) global vertical or horizontal reference axis. Joint Angles are RELATIVE ANGLES, measured between two adjacent segments with the angle’s vertex at the joint center.
shank = shank 2 - shank 1 Shank segment angular velocity () Shank = shank 2 - shank 1 = time2 - time1 time Segment Angular Velocity () Time 1 Time 2 shank 2
(0.65, 0.90) (0.85, 0.50) (0, 0) +X Calculating Segment Angular Position with segment endpoint coordinate data (x, y) +Y
(0, 0) +X Calculating JOINT Angular Position with Segment Angular Position Data +Y
Adjacent joint angle-angle diagrams are used to characterize joint coordination patterns Hip Knee Knee Ankle
Similar knee-hip coordination patterns during push phase Hurdle Take-off LJ H Hip angle (degrees) Long jump Take-off Knee angle (degrees)
Analysis - Total Body Level Initial horizontal position of TBCM relative to foot at touchdown is significantly related to ground contact duration CMx Horizontal GRF (N) Foot CMx Time (s) after contact CMx • How is TBCM position controlled or repositioned relative to the foot? • Why? Foot CMx
Thigh Knee Foot Ankle Assessing Segment Contribution to Joint Motionin order to understand the primary source of observed joint motion Shank Time 1 Time 2 knee Shank
Segment contribution to TBCM control Shank rotation during impact phase significantly delays peak thigh rotation post-impact (p<.01) Segment angular velocity (rad/s) Shank sav A Thigh sav B Horizontal GRF (N) time (s) after contact
Adjacent Joint Coordination: Angle-Angle Diagrams A Knee angle (deg) B Ankle angle (deg)