Download
1 / 9
90 likes | 93 Views
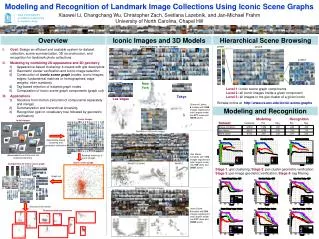
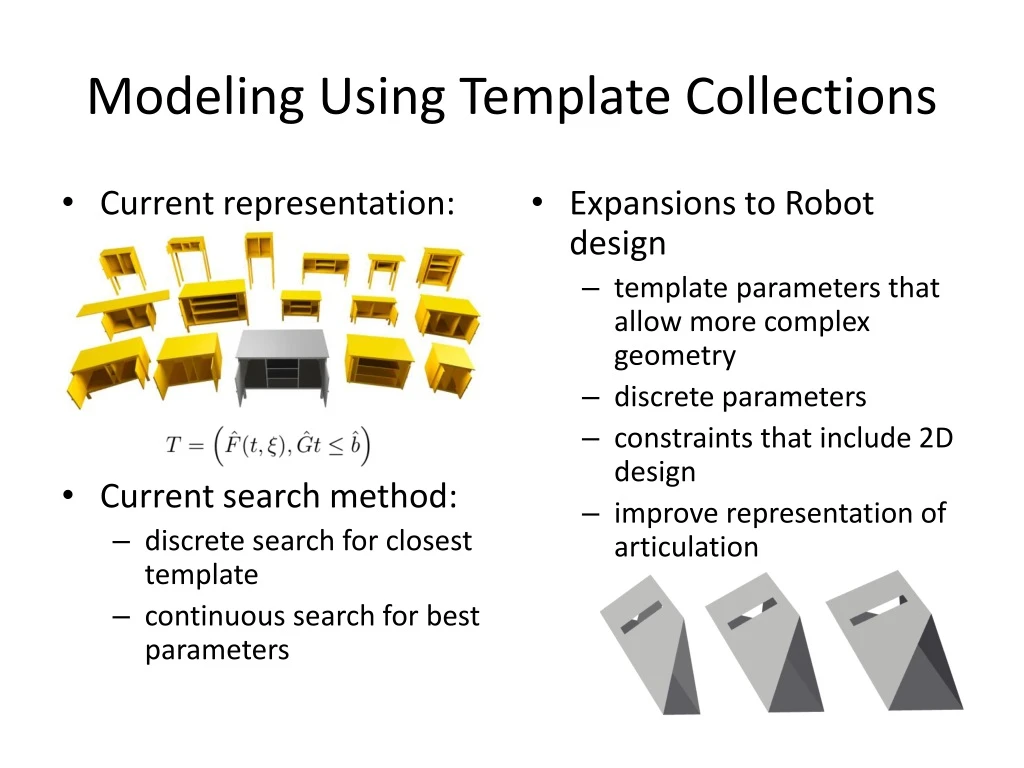
Modeling Using Template Collections. Current representation: Current search method: discrete search for closest template continuous search for best parameters. Expansions to Robot design t emplate parameters that allow more complex geometry d iscrete parameters

E N D
Modeling Using Template Collections • Current representation: • Current search method: • discrete search for closest template • continuous search for best parameters • Expansions to Robot design • template parameters that allow more complex geometry • discrete parameters • constraints that include 2D design • improve representation of articulation
Combining Templates • User interface • select components • alter template parameters • set position and orientation • Inferring Connectivity • Goals: • user-specified articulation • structural stability • Methods • inference • physical simulation
Scripted folded quadrotor design • Goal: Automatically generate robot design given functional description • Quadrotor(payload=10g, max_speed=1m/s, minimize: weight); • Outputs DXF file for laser cutter, STL file for 3d printer, bill of materials for actuators / controls • Current status: Python scripts generate structural elements by specifying geometry • Quadrotor(diameter=20cm, thickness=1cm, motor_diameter=1cm, …); • Parameterized dimensions, hardcoded topology • Research Plan: • Measure mechanical parameters of folded structural elements • Generate simple models relating critical parameters to geometry • Use models to determine required robot dimensions • Aside: partition overall design space between folding / 3d printing / etc.
John Romanishin Rigid Folded Structures • Potential Benefits: • Quick to assemble • Electronic components have support • Clear distinction between flexible joints and rigid members • Current design attempts are trying to develop a rigid quad rotor frame. • Rigid layer is acrylic • Flexible layer is adhesive backed thin peek. • Functional details are added by simple FDM 3d printed components Attempt to develop a process to quickly create functional components by using a composite laminate of different 2-d laser cut layers.
Fabrication – Printable PCBs Copper Laden Ink: CO2 Laser (10um): 0.100in dia holes Nd:YAG Laser (355nm): 0.050in dia holes Thermal Transfer Printer: Mechanical Punch: 0.040 & 0.125in dia holes
REACT Programming Paradigm & Language • Design • Programming Paradigm & Language • Designing and developing interactive systems • Simplified programming model • Facilitate event-driven and concurrent programming • Implementation • Source-to-source compilation framework (OCaml implementation) • Target languages: • Lego Mindstorms NQC • Foldable robot C-subset • Future Plans: • Code generation framework that provides: • Code free of common concurrency issues • Automatically propagates data updates to relevant clients, ensuring data consistency • Tool suite: • Testing and static analysis techniques for ensuring functional correctness
Printable Robots – Fabrication (Harvard/MIT) Design Composition (gripper/crawler) Crawler design evolution Design Templates Stair climbing Printed robots playing chess Self-folding inchworm robot
Current Results • Autonomous printed Hexapod • 2-DOF legs • Variety of gaits • Tripod • Wave • Ripple • Rotating • Tripod with curvature Next goal • Develop platform and algorithms for climbing
Mechanical Properties of Printable Processes • Goal: • To identify the mechanical properties of different materials and geometries. • Mechanical Properties to identify • Stiffness: Young’s Modulus Shear Modulus • Strength: Yield Strength Ultimate Tensile Strength • Materials • 5 mil, 7 mil, & 10 mil polyester • PEEK • 3D printed materials • Composites: Acrylic + polyester • Geometry • Triangular & Rectangular Beams • Different Perforations • Procedure • Instron Tension Test: • Measure Young’s Modulus, yield strength, and ultimate tensile in tension • Instron Torsion Test: • Measure shear modulus, yield strength, and ultimate tensile in torsion Image available at: https://alliance.seas.upenn.edu/~medesign/wiki/index.php/Courses/MEAM247-11C-P2P1