Download
1 / 27
270 likes | 517 Views
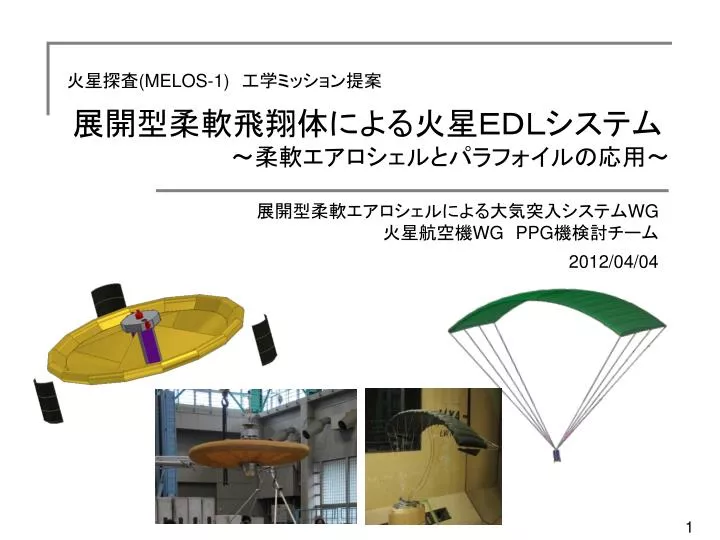
火星探査 (MELOS-1) 工学ミッション提案 . 展開型柔軟飛翔体による火星EDLシステム ~柔軟エアロシェルとパラフォイルの応用~ . 展開型柔軟エアロシェルによる大気突入システム WG 火星航空機 WG PPG 機検討チーム. 2012/04/04. 背景:火星探査ミッションの将来像の一案. <超小型着陸探査機による分散探査( FS ランダー)>. オリジナルのコンセプトは, 1kg 程度の超小型の飛翔体に最低限の観測機を搭載して火星表面に数 10 ~ 100 個の単位で探査機を降下させ,大局的に把握する.

E N D
火星探査(MELOS-1) 工学ミッション提案 展開型柔軟飛翔体による火星EDLシステム ~柔軟エアロシェルとパラフォイルの応用~ 展開型柔軟エアロシェルによる大気突入システムWG 火星航空機WGPPG機検討チーム 2012/04/04
背景:火星探査ミッションの将来像の一案 <超小型着陸探査機による分散探査(FSランダー)> オリジナルのコンセプトは,1kg程度の超小型の飛翔体に最低限の観測機を搭載して火星表面に数10~100個の単位で探査機を降下させ,大局的に把握する. ただし,これを実現するために,探査機の小型,軽量化に対して多くの革新的な技術開発が必要. (現在,東京大学,鈴木研を中心に試行錯誤中) このコンセプトにピンポイント着陸技術を組み合わせれば,(百地点といわずとも)数地点への着陸でも十分な科学的な成果を得られないか? 大気突入探査機を軽量化,小型化して,限られたリソースの中で探査機を複数搭載する可能性を探る.
CONTENTS *展開型柔軟構造飛翔体を利用したEDLシステムの実証提案 柔軟エアロシェルとパラフォイルの組み合わせ *ミッションコンセプトと実証試験シークエンス *機体設計 機体設計方法の説明 設計結果:重量配分,機体概要,大気圏突入軌道など <実現にむけた,設計精度の向上,性能向上のための技術的課題> *柔軟エアロシェル展開と収納 *柔軟エアロシェルの大型化 *柔軟エアロシェル用の膜面材料の開発とその評価 *パラフォイル空力性能の正確な把握と揚抗比の向上 *パラフォイル材料の軽量化(火星探査専用に改良) *軟着陸技術の確立(フレア操作,エアバックなど) *パラフォイル用推進器,火星環境での高精度誘導
展開型柔軟構造飛翔体の特徴 ~大気突入用柔軟エアロシェルとパラフォイル型飛行体~ 大気突入用の展開型柔軟エアロシェル *省スペース化に貢献 *低空力加熱で安全性の向上,開発コストの低減 *今後の開発により,従来システムより軽量化の可能性もある. パラフォイル型飛行体 *省スペース化に貢献 *誘導制御により降下軌道を制御し,目標地点へ着陸. *着陸時のフレア操作により,従来のパラシュートより少ない重量で軟着陸が可能. *推進器を搭載すれば巡航飛行も可能 これらを組み合わせることにより,限られたリソースを有効に利用できる,小型で,軽量で,自由度の高い,火星探査EDLシステムを提案.
展開型柔軟飛翔体による火星大気圏突入&着陸実証機の概念図展開型柔軟飛翔体による火星大気圏突入&着陸実証機の概念図 周回機には 複数の突入機を搭載 姿勢,減速度を微調整し 大気突入準備をととのえる. (軌道離脱から突入まで6時間) 大気突入直前に SMを分離 逆噴射で軌道離脱 SMで姿勢を制御し スピンアップ カバーを開放,ガス注入し 柔軟エアロシェルを展開 周回軌道上で 突入機+SMを分離 大気圏突入 亜音速まで減速した後にエアロシェルを使ってパラフォイルを引き出す (頭部HSも分離) 滑空状態で目標地点へ誘導. 併せて上空からの撮像,観測 (飛行時間は30分~1時間) 着陸後は太陽電池を 開いて地上で観測. エアバッグとフレア操作で軟着陸
ミッションシークエンス 1)周回軌道上で母船から,サービスモジュール(SM)と大気突入機を分離 *初期軌道は遠火点距離21,912km(速度763.7m/s),近火点距離3,847kmの楕円軌道) 2)SMで姿勢制御,スピンアップ. 3)エアロシェル展開.(←カバー開放,ガス注入) 4)遠火点で軌道離脱モータ点火.軌道離脱→大気突入軌道へ. *減速度は37.3m/s(パラフォイル展開時の位置分散を160km以内にする) 5)姿勢,及び,減速量を微調整. 6)大気圏突入直前にSMを切り離す. 7)軌道を約半周後(軌道離脱から約6時間後)に大気圏へ突入. 7)低弾道係数の機体により,低空力加熱の軌道で大気圏突入. *淀み点の加熱率はおよそ60kW/m2程度とする. 8)亜音速まで減速された時点(高度20~25km程度)で,エアロシェル,頭部HS分離 →同時に,パラフォイル放出展開,着陸用エアバックも膨張 9)パラフォイルにより降下軌道を制御.目標地点へ誘導. *パラフォイルの揚抗比は4~5を仮定しているので誘導性能は80~125km (今回の提案では推進器は搭載しないので滑空のみ.飛行時間は30分から1時間) 10)フレア操作,エアバック効果で目標地点近傍へ軟着陸. *滑空状態で着陸した場合の沈下速度を5m/sを目標→フレア操作でさらに減速. 11)太陽電池パドル展開し,地表観測を開始.
展開型柔軟飛翔体による火星大気圏突入システムの特徴展開型柔軟飛翔体による火星大気圏突入システムの特徴 *展開型飛翔体を積極的に利用することにより,その収納効率のよさを生かして,探査機システムをコンパクトにまとめて,ミッションの自由度を増やす.限られたリソースの中で,複数の探査機を搭載する可能性を見出すことができ,分散探査という方向への発展がありうる.(複数の探査機を搭載するのは,リスクも分散できる.) *柔軟構造エアロシェルにより,大気突入機を低弾道係数化することにより,大気圏突入中に経験する空力加熱を大幅に低減し,安全性を高める.また,そのことにより,ヒートシールドの開発費用を抑えることができる. *パラフォイルを利用することにより,目標地点へのピンポイント着陸が可能になり,探査機の地上移動の負担を減らすことができる. *オプションとして,パラフォイルに推進器を搭載することにより,巡航飛行を可能にし,上空からの探査システムとしても発展可能である.
機体設計の流れ1 <大気圏突入軌道の決定> 与えられた初期軌道と,着地点分散範囲の制限と空力加熱の限界より 軌道離脱減速度,弾道係数,大気圏突入軌道を決定する. 初期軌道:遠火点距離21,912km(速度 763.7m/s),近火点距離3,847km(高度450km)の楕円軌道) 突入軌道制約: マッハ数1の時点での大気密度変動による位置分散が160km以下(L/D4のパラフォイルで誘導可能な範囲) 淀み点の輻射平衡温度が1000℃以下(熱流束にして140kW/m2以下←Tauberの式の80%(Rn=0.5m)と仮定) トーラス部の輻射平衡温度が650℃以下(熱流束にして40kW/m2以下←淀み点の60%と仮定) <エアロシェルのサイジング> 詳細CFD及び極超風試より推定 機体重量を仮置きし,弾道係数より,エアロシェルの最大直径を決める. 大気圏突入時の減速度から構造強度の制限よりトーラスのチューブ直径が決まる. エアロシェルの形状が決定し,エアロシェルの重量が決まる. 構造強度推算:エアロシェルの構造強度は内圧により発生する張力(πr2p )に比例(内圧1atm,比例定数1.25) エアロシェルの重量:フレア部は面密度0.2kg/m2, トーラス部の面密度は2kg/m2 観測ロケット実験機の実績に 1.5~2倍のマージンを見ている. <淀み点のTPS重量> 淀み点熱流束から頭部のヒートシールドの重量が決まる. 淀み点金属TPS重量:面積(直径50cmの円板)×面密度(0.01×(輻射平衡温度(degC)(kg/m2))で与えた. 過去の文献を参照しているが,情報源が古いのでアップデートが必要
機体設計の流れ2 <サービスモジュール(SM)について> SM重量を確保する.(機体規模により増減すると考えられるが,今回は15.5kgとした(内訳は後述)) SM重量を含んだ全機体重量と減速度から軌道離脱用モータ重量を決定 軌道離脱モータ重量:DASH-DFMを参考にして決定. <パラフォイル機のサイジング> 全重量からSM重量,AS重量,HS重量を引いて,パラフォイル機の重量が決まる. パラフォイルの空力特性(揚力係数,抗力係数)と着陸時の沈下速度制約からパラフォイル翼面積,及び,翼重量が決まる. パラフォイルの仮定と制約: パラフォイルの揚力係数5.0,抵抗係数1.0,(揚抗比5.0)とする. パラフォイルの単位翼面積あたりの重量は0.2kg/m2とする. 着陸時(大気密度0.01kg/m2)の沈下速度を5.0m/s以下とする. <ハウスキーピングに必要な機器(飛行中,及び,地上観測中)> HK機器重量を確保する.(機体規模により増減すると考えられるが,今回は22kgとした(内訳は後述)). 上記の仮定と制約のもと,突入機全機の重量をパラメータとして サイエンスペイロード3kgとなるように,機体諸元,及び,重量配分を決定する.
設計結果1 ~柔軟構造火星EDLシステムの諸元(総重量80kg)~設計結果1 ~柔軟構造火星EDLシステムの諸元(総重量80kg)~
EDL機の概要1 <衛星搭載形態> <大気圏突入形態> 軌道離脱用 個体モータ 分離機構など エアロシェル用 ガス注入系 通信アンテナ SMは分離 SM制御機器 ZYLON織物 +シリコン (orカプトン) SM 25cm チューブ直径 17cm ZYLON織物 姿勢制御用 ガスジェット ガスジェット用 タンク 全長 105cm 70deg 75cm パラフォイル 収納スペース 突入機 80cm 曲率半径50cm エアロシェル 収納スペース カプセル直径50cm エアロシェル カバー(3分割) エアロシェル最大直径316cm 30cm角 直径60cm
大気圏突入軌道1 ~軌道分散~ 大気密度による着地点の分散評価 遠火点 減速度37.3m/s 弾道係数5.2kg/m2(抵抗係数1.5) 周回機との連携で,大気密度(や風)を現地で予測(測定)して,それを基に減速度を調整するなどし,大気密度の分散を緩和する工夫ができないか?将来のEDLに対して重要な技術かもしれない.
大気圏突入軌道2 ~突入軌道~ 速度 vs 高度 マッハ数 vs 高度 高度20kmでマッハ数1以下となる パラフォイル展開 柔軟エアロシェルによる低弾道係数化により 高高度(60~90km)で減速が開始される. 高度20kmではいずれの大気モデルでもマッハ数1以下となっており,亜音速領域でパラフォイルを展開できる.
大気圏突入軌道3 ~突入環境~ 時刻(軌道離脱から) vs 加速度 時刻(軌道離脱から) vs 淀み点熱流束 空気力による減速度は最大で50m/s2程度となるためエアロシェルにかかる空力荷重は300kgf程度である. Tauber’sの式(Rn:0.5m)の80%として見積もった淀み点熱流束は最大で60kW/m2である.トーラス部はその60%と予測される.
EDL機の概要2 <パラフォイル飛行形態> <着陸後の形態> 翼幅長20m *パラフォイルは着陸後,切断する. *着陸時に転倒しても太陽電池パドルの展開によって起き上がる仕組みを考える 内寸30cm角 UHFアンテナ 12m パラフォイル 制御用モータ パラフォイル エアバッグ用ガス注入系 翼弦長5m HK電子回路 ライザー 密閉型 パラフォイル ペイロード 太陽電池 パネル展開 10cm 送信機 80cm バッテリー 着陸用エアバッグ 18cm 下面に航法用カメラとレーザー高度計を配置 180cm
機体設計のまとめ 柔軟構造エアロシェルとパラフォイルを組み合わせたEDLシステムについて,火星周回軌道上で総重量80kgのシステムにより,サイエンスペイロード3kgを火星地表面の目標地点にピンポイントで輸送できる可能性があることを示した.
技術的課題の整理 柔軟構造エアロシェルについて 柔軟エアロシェルの研究開発は約10年前から,基礎研究からフライト試験(気球)まで幅広く行ってきた.さらに,今年度実施する予定の観測ロケット実験にむけての準備の中で,柔軟エアロシェルを有する大気圏突入システムとしての基本形が完成した. 現在は,JAXAの重点研究に採択され,実用にむけての要素技術の性能向上させ,よりシステムとしてメリットを強化すること,設計精度向上のための評価試験を実施するフェイズに入っている.
技術的課題1 ~エアロシェルの収納と展開~ 観測ロケット実験用の実験機の開発の過程で,直径1.2mのエアロシェルの収納と展開について多くのノウハウを得た.回転環境下,真空槽内での展開試験については地上試験で検証が終了している. 無重量環境下での挙動については観測ロケット実験にて確認できると考えている. 0)セットアップ,スピン開始(1Hz) 4)実験機を分離,射出 0.23m 1)エアロシェルカバー開放 2)遠心力によりエアロシェル展開 3)トーラスにガスを注入 50cm/s 1.2m エアロシェルカバー 観測ロケット実験のフライトモデルでの 最終シークエンス試験(1G,1Hz,大気圧) (2012/03/02実施@JAXA相模原,構造試験棟)
技術的課題2 ~エアロシェルの大型化~ 現在,開発中の直径2.5mの12角形 インフレータブルリング 面外不正が顕著になると構造強度が低下するため,面外への不正を小さく保ちながら,エアロシェルを大型化する必要がある. 1.2m 2.5m 気室部(内圧2kPa) 観測ロケット実験用の 直径1.2mのエアロシェル (風洞試験の様子) 面外変形が顕著なモデルでは, 構造強度が6割ほどに低下 円形リングでは,縫製の精度の限界などの理由で,1.2mのエアロシェルでも面外不正を抑制するのは限界であった. そこで,面外不正を抑制するよう円柱をつなぎ合わせた多角形リングに形状を変更し,その試作品を製作した. 2.5m 面外不正がすくなく,均一なトーラスの製作に成功. フレア部も製作し,大型エアロシェルの構造強度を把握し,さらなる大型化へと進む予定. ZYLON織物の外皮をかぶせた状態(132kPa)
技術的課題3 ~エアロシェル材料の耐空力加熱性能~ 柔軟構造エアロシェルのトーラス部の耐空力加熱性能が設計の制約となっている.その部分の空力加熱の予測,及び,耐空力加熱性能の正確な把握が必須の課題である. <空力加熱の予測> <耐空力加熱性能の把握> 剛体模型を用いて極超音速風洞試験での 全機まわりの空力加熱環境の把握 予測された熱流入量に対して材料が耐えられるかを実験的に確認. 球形インフレータブル模型の極超音速風洞試験の様子 熱風機による多層膜の 1次元加熱モデル試験 赤外サーモグラフィで模型表面の熱流束分布を計測 数値解析の検証データとして利用 極超音速風洞や熱風機などでも,熱流束の最大値は再現できるが,エンタルピーが低く継続的に加熱することができないため,材料の評価試験には適さない.一方,これまで再突入機の開発に用いられているアーク風洞等の既存の装置は空力加熱が大きすぎる. 高精度な数値解析による柔軟エアロシェル大気突入機周りの空力加熱を予測 実在気体,膜面変形,触媒性,乱流遷移を 考慮して大気突入軌道に沿った解析を実施 *レーザー加熱試験 加熱方式が輻射なので,実環境(実際は主に対流で加熱される)と異なるが一定の熱流束を継続的に与えることができるため,耐久試験という観点ではクイックな成果が得られる. *ICP加熱試験(現在,準備中) 高エンタルピーかつ低密度なプラズマ流が得られるため,最も実際に近い環境での試験ができると考えている. ICP風洞@東大柏1kW級 並進温度分布 圧力分布
技術的課題の整理 パラフォイル着陸システムについて 火星探査用のパラフォイルの検討は,火星航空機WGの中のPPG機検討グループの中で,2年前から開始されたばかりである.地球と大きく環境が異なる火星環境でのパラフォイルの形を検討し,その中で,“密閉型パラフォイル”が有効である可能性が高いということで,これまで,基礎的な研究をすすめてきた.その中で,パラフォイル自体が力学的に解明されていない乗り物であることがわかり,また,密閉型であることでの特有の現象なども発生し,今後実用にむけては,まだまだ,研究課題は豊富である. 成立性の検討の中で,現時点では,重量割合の中でパラフォイルの重量が占める分が大きく,さらに問題は翼面積が大きくて収納スペースが確保が難しく,小型化の制限となっている.ただし,パラフォイルの少しの性能向上(特に揚抗比やフレア技術の確立)が,本システムの能力を格段に向上させることが確認されており,今後の研究の進捗具合では大幅な改善がある可能性を秘めている. 今年度から,予算を獲得を目指し,フライト試験と風洞試験を軸にした研究開発を本格的に開始する計画であるので,そのあたりがどこまで改善できるかを示していきたと考えている.
技術的課題4 ~パラフォイルの性能把握と揚抗比向上~ 密閉型パラフォイルの採用の理由は, 1)大気密度の低い火星環境で滑空時に安定して翼型を形成するため(兼,耐ダスト対策) 2)能動的な展開を可能にし,展開の信頼性を向上させる. 3)空気取り込み口をなくすことによる揚抗比の向上→圧倒的な能力向上の可能性 翼幅2mのパラフォイルを用いてJAXA調布の6.5m×5.5m大型低速風洞で風洞試験を実施. 密閉型パラフォイル 揚抗比が倍に 比較用のラムエア型 密閉型パラフォイルでは,揚抗比が4~5程度を実現できることが確認できている. (比較用の同規模のラムエアパラフォイルでは2~2.5程度). この結果を踏まえて,さらなる揚抗比向上の方法を検討し,システムとしての能力向上を目指す.
技術的課題5 ~パラフォイル材料の決定~ 過去に地球用に開発されたパラフォイルの諸元(→単位翼面積辺りの重量は,0.2kg/m2程度) <重量増の要因> 密閉型を実現するために,気密性を要求される部分の材料はラムエア用より重くなる. <軽量化の要因> 火星は,重力と大気密度が小さいため翼面荷重が非常に小さい(1N/m2以下).そのため,材料強度が必要なく軽量にできる 実際に試作を重ねる中で,適切な材料を選択し,重量を見積の精度を上げる. 技術的課題6 ~軟着陸技術の構築~ 設計の中で,パラフォイルが占める重量,及び,翼面積が大きく設計の大きな制約になっている. 軟着陸を満たすための沈下速度5m/sの制約が緩和されれば,設計の自由度は増える. 例えば,沈下速度7m/sまで許容すれば,パラフォイルに必要な翼面積,重量が半分となる. (同じ規模のシステムだとペイロードが10kg増 or ペイロードを3kgを固定すると全体が65kg程度とより小型になる) エアバッグ,フレア操作を駆使し,大きな沈下速度からも衝撃を緩和し,軟着陸を実現する方法を構築する.これを開発する唯一の方法として,フライト試験を実施し,経験を積んで行きたい.
技術的課題7 ~パラフォイル用推進器と火星での航法誘導系~ (推進器)推進用プロペラ(1/4模型)の気流内推力測定 (航法)無人機によって取得した画像データの 解析による位置・速度同定 ・SIFT (Scale Invariant Feature Transformation) を基本同定法とした特徴抽出・マッチング 火星用に設計したプロペラを通常の風洞内に設置し推力を測定 折りたたみ時 フレーム1 比較・初期位置同定 フレーム2 比較 フレーム3 時刻 比較 データベース画像 ・初期位置同定 データベース画像とのマッチングにより初期位置を同定. 処理時間と画像解像度の違いによる誤同定削減が課題. ・初期位置以降の位置・速度同定 直前フレームとのマッチングにより位置・高度・速度を同定. 数値微分に伴うノイズ低減のためのフィルタリング処理, および機体の姿勢変化に伴う画像位置変動の補正が必要. 展開時 実験条件 プロペラ諸元(1/4模型) <GPSデータと画像解析による高度と位置の比較例> 測定結果より,地球上大気圧下における推力予測値とよい一致が見られる.火星条件下に合わせたアスペクト比の小さな特殊な形状のプロペラであってもAdkinsとLiebeckの理論を用いて設計が可能である. 高度 水平位置
まとめ 火星表面探査のためのEDLシステムの一つの候補として,展開型柔軟エアロシェルとパラフォイルを利用した小型軽量ピンポイント着陸システムについて検討し,現時点の技術レベルで,システムを設計し,成立性を示した.(総重量80kgのシステムで,有効地上到達重量20kg,サイエンスペイロード3kgとなる見込みを得た) ただし,展開型柔軟エアロシェル及び火星用パラフォイルの両者は共に,まだ実現されていない新規技術であり,現時点では未成熟な分も残っている.しかし,その分将来にむけての可能性が大きいと考えている.
大気突入用の展開型柔軟エアロシェル 観測ロケット実験用実験機 *省スペース化に貢献 *低空力加熱で安全性の向上,開発コストの低減 *今後の開発により,従来システムより軽量化の可能性もある. →観測ロケットによる大気圏突入試験用の直径1.2mのエアロシェルを有する実験機の開発を完了. →今年度から,エアロシェルの大型化,膜面材料の高性能化にも本格的に着手. 収納状態 風洞試験 パラフォイル型探査機 エアロシェル展開&射出 密閉型パラフォイル試作機の風洞試験の様子 *省スペース化に貢献 *誘導制御により降下軌道を制御し,目標地点へ着陸. *着陸時のフレア操作により,従来のパラシュートより少ない重量で軟着陸が可能. *推進器を搭載すれば巡航することも可能 →火星専用(密閉型)パラフォイルの試作,試験を開始 →来年度からは,本格的に,火星探査のEDL系として実用をめざしフライト試験を軸にした開発を進める計画. 翼幅1mの試作機 @惑星環境風洞 翼幅2mの試作機 @JAXA調布大低 *収納効率のよさという柔軟構造体の利点を生かして,探査機をできるだけ小型化する. *ピンポイント着陸により,地上移動への負担を減らし,ランダ(ローバ)を軽量化. *限られたリソースの中に,複数の突入機を搭載できる可能性を見出す. →複数の探査機を搭載するのは,リスクの低減にもつながる.