Download
1 / 8
81 likes | 417 Views
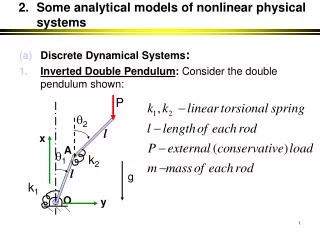
Double Pendulum. Coupled Motion. Two plane pendulums of the same mass and length. Coupled potentials The displacement of one influences the other Coupling is small Define two angles q 1 , q 2 as generalized variables. k. l. l. q 1. q 2. m. m. Coupled Equations.

E N D
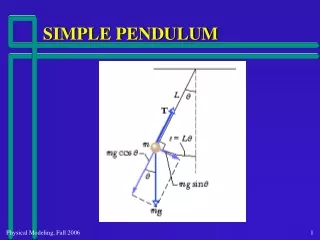
Coupled Motion • Two plane pendulums of the same mass and length. • Coupled potentials • The displacement of one influences the other • Coupling is small • Define two angles q1, q2 as generalized variables. k l l q1 q2 m m
Coupled Equations • The Lagrangian has two variables. • Two EL equations • The equations are coupled in the generalized coordinates.
Uncoupled Variables • Add and subtract the two equations to get a different pair of equations. • Define two new generalized variables. • c1, c2 • There are two characteristic frequencies. • One from each equation
A simple pendulum can move in a circle. 1-dimensional configuration space Represented by a circle S1 The double pendulum moves in two circles. 2-dimensional space Circles are independent Represented by a torus S1S1 Configuration Space
Local Configuration • Motion near equilibrium takes place in a small region of configuration space. • Eg. 2-D patch of the torus • Synchronized oscillations would be a line or ellipse. • Lissajous figures Torus: S1 S1 q1 q2 q2 q1
Quadratic Potential • An arbitrary potential may involve many variables. • Assume time-independent • Generalized coordinates • Small oscillations occur near equilibrium. • Define as the origin • Zero potential • Near equilibrium the potential can be expanded to second order.
The potential and kinetic energies can be expressed with matrix terms. Symmetric matrices Matrices G and V imply the form of equations of motion. Matrix G-1V not generally diagonal Small Oscillation Lagrangian next