Download
1 / 24
300 likes | 788 Views
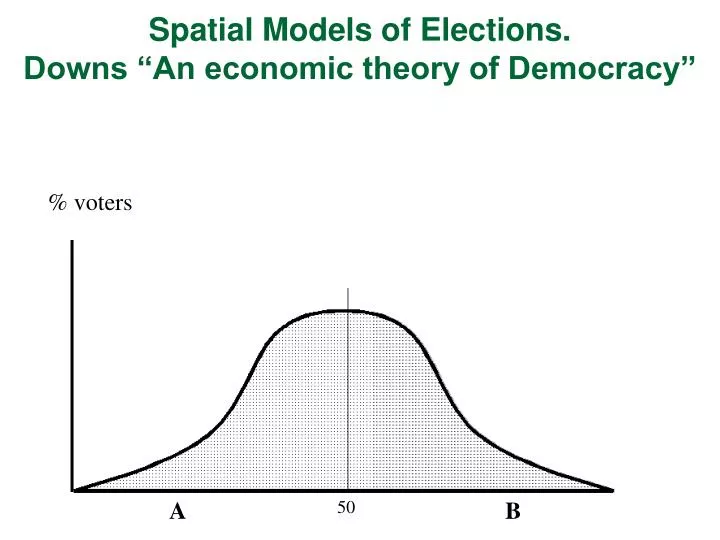
Spatial Models of Elections. Downs “An economic theory of Democracy”. % voters. A. 50. B. Two party System with one mode. % voters. A. 50. B. Two party System with one mode. % voters. A. 50. B. Two party system with two modes and abstensionism. % voters. A. B.

E N D
Spatial Models of Elections.Downs “An economic theory of Democracy” % voters A 50 B
Two party System with one mode % voters A 50 B
Two party System with one mode % voters A 50 B
Two party system with two modes and abstensionism % voters A B
Two party system with two modes and abstensionism % voters A B
Multiparty system % voters A B C
Assumptions behind two party convergence • 1. There are only two political parties. • 2. There is a single-round election for any office. • 3. The election chooses a single candidate. • 4. Elections take place within a single constituency. • 5. The election is decided by a plurality vote. • 6. Policies can be located along a single (left-right) dimension. • 7. Candidate policy positions are well defined. • 8. Candidate policy positions are accurately estimated by each voter. • 9. Voters look no further than the next election. • 10. Eligible voters go to the polls if the expected benefits of their vote’s contribution to the election of the candidate for whom they would vote exceed the“costs” of voting. • 11a. Voters care only about which candidate/party will enact policies closest to their preferences. They vote for the candidate closest to their own policy location. • 11b. If there are no policy differences among the candidates/parties, then voters will be equally likely to support each of the candidates/parties. • 12. Parties/candidates care only about winning. • 13. Parties/candidates look no further than the next election. • 14. Candidates/parties accurately estimate the policy preferences of voters, or at minimum, they can identify the location of the median voter overall and the median voter in each party. • 15. Candidates are part of a unified party team.
Spatial Models of Legislatures Assumptions • Legislature as a set of n (odd number) individuals • Majority Rule • One dimension. Legislature must choose a point on a line. • Each Legislator i has an ideal point xi and single peaked preferences • m=median voter with ideal point xm • There is always a status quo in place, labeled x0 • There is a division-of-labor arrangement: committee system • c= median voter of the committee with ideal point xc 8
Three decision making regimes • Pure majority rule. • No Committee system; any legislator can offer a motion to change the status quo x0 • The floor is open for some new motion (against old status quo, if it survived, or the new status quo) • This procedure of motion-making and voting continues until no member of legislature wishes to make a new motion.
Equilibrium Outcome Pure Majority Rule Xc Xm Xc (committee’s median voter) Xm (parliament’s median voter) Status quo (X0)
Three decision making regimes 2.Closed-rule committee system • A Committee (c)first gets to decide whether the legislature will consider changes in the status quo; it has gatekeeping power • If the “gates are opened” the Committee makes a proposal • The parent legislature (the floor F) may vote the committee’s proposal either up or down . The proposal is closed to amendments Xc yes m propose X0 c no Not propose X0Status quo
Equilibrium Outcome Closed-rule commmittee system Xc Xm Gridlock 2 Xm-Xc Xc (committee’s median voter) Xm (parliament’s median voter) Status quo (X0)
Three decision making regimes 3.Open-rule committee system • A Committee (c)first gets to decide whether the legislature will consider changes in the status quo; it has gatekeeping power • If the “gates are opened” the Committee makes a proposal • The parent legislature (the floor F) may emend the committee’s proposal. Committee concedes its monopoly access to the agenda Xm emend m propose X0 c no Not propose X0Status quo
Equilibrium Outcome Open-rule commmittee system Xc Xm Gridlock 2 Xm-Xc Xc (committee’s median voter) 2 Xc-Xm Xm (parliament’s median voter) Status quo (X0)
Equilibrium Outcome Open-rule commmittee system Xc Suboptimal equilibria Xm Gridlock 2 Xm-Xc Xc (committee’s median voter) 2 Xc-Xm Xm (parliament’s median voter) Status quo (X0)
If we take in consideration both dimensions at the same time and no monopoly of the agenda setting power…MacKelvey Caos theorem p1 sq
= W (p..) p2 p1
p2 p3
p.. p3
Multidimensional space and decision making dimension by dimension • As in the pure majority rule anyone is free to make a motion to change the status quo • However decision making takes place one dimension at a time, in some pre-set order. • The group (the parliament) continues to focus on amending the status quo on the first dimension until no more amendments are offered , then turns its attention to the next dimension etc.
Multidimensional space and decision making dimension by dimension Dim2 Xa Xa2 Multidimensional median Xc Xm Xc2 Xb Xb2 Dim1 Xb1 Xa1 Xc1
Multidimensional space and closed rule • Xa is the agenda setter ; X0=Status Quo • W(X0) is the Xa’s opportunity set. As under closed rule proposals are not subject to amendments, the Xa’s objective is to move the final policy outcome onto the indifference contour of smallest radius (namely closest to Xa’s ideal point ) that still lies in W(X0)
Xa proposes pa and Xc and Xa vote yes. pa = W (X0) x0