Download
1 / 12
150 likes | 438 Views
Plane Kinematics of Rigid Bodies. Lecture IX. Introduction. The relationships governing the displacement, velocity, and acceleration of particles (points) as they moved along straight or curved path were developed earlier.

E N D
Plane Kinematics ofRigid Bodies Lecture IX
Introduction • The relationships governing the displacement, velocity, and acceleration of particles (points) as they moved along straight or curved path were developed earlier. • In rigid-body kinematics, same relationships are used but must also account for the rotational motion of the body. • This means that rigid-body kinematics involves both linear and angular displacements, velocities, and accelerations. • Rigid Body: a system of particles for which the distance between the particles remain unchanged. However, this an ideal case, since all solid materials change shape to some extent when forces are applied to them. Nevertheless, if the movements associated with the changes in shape are very small compared with the movements of the body as a whole, then the assumption of rigidity is acceptable. • Rigid Body Plane Motion: occurs when all parts of the body move in parallel planes. For convenience, the plane of motion is considered to be the plane that contains the mass center, and the body will be treated as a thin slab whose motion is confined to the plane of the slab.
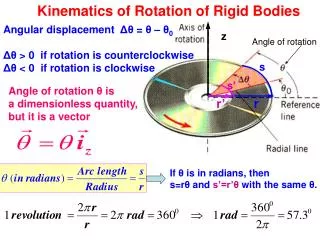
Rotation • The rotation of a rigid body is described by its angular motion. • All lines on a rigid body in its plane of motion have the same angular displacement, velocity and acceleration. • Angular-Motion Relations: • Rotation about a Fixed Axis: For constant angular acceleration
Absolute & Relative Motion Analysis • In Absolute Motion Analysis: the geometric relations (linear and angular variables) will be defined in a quite straightforward manner; then, the time derivatives of these quantities will involve both linear and angular velocities and accelerations. If the geometric configuration is complex, the relative motion analysis will be considered. • Relative Motion Analysis: • Relative Velocity due to Rotation: • Instantaneous Center of Zero Velocity: this point has a zero velocity. A body may be considered to be in pure rotation about an axis normal to the plane of motion, passing through this point. This axis called the instantaneous axis of zero velocity, and the intersection of this axis with the plane of motion is known as the instantaneous center of zero velocity.
Absolute & Relative Motion Analysis – Cont. • Relative Acceleration due to Rotation:
Motion Relative to Rotating Axes • In particles, when we describe the relative motion analysis, a non-rotating axes were used. The use of this type of axes facilitates the solution of many problems in kinematics where motion is generated within a system or observed from a system which itself is rotating. • Relative Velocity: • Relative Acceleration:
Exercise # 1 The right-angle bar rotates clockwise with an angular velocity which is decreasing at the rate of 4 rad/s2. Write the vector expressions for the velocity and acceleration of point A when w = 2 rad/s. x
Exercise # 2 Crank CB oscillates about C through a limited arc, causing crank OA to oscillate about O. When the linkage passes the position shown with CB horizontal and OA vertical, the angular velocity of CB is 2 rad/s counterclockwise. For this instant, determine the angular velocities of OA and AB. 250 mm
Exercise # 3 Crank CB has a constant counterclockwise angular velocity of 2 rad/s in the position shown during a short interval of its motion. Determine the angular acceleration of the links AB and OA for this position. 250 mm
Exercise # 4 At the instant represented, the disk with the radial slot is rotating about O with a counterclockwise angular velocity of 4 rad/s which is decreasing at the rate of 10 rad/s2. The motion of slider A is separately controlled, and at this instant, r = 150 mm, r. = 125 mm/s, and r. . = 2025 mm/s2. Determine the absolute velocity and acceleration of A for this position.