Download
1 / 12

E N D
ROBOTIKA BUCHTA Jan
ROBOT Robot je samostatně pracující stroj, vykonávající určené úkoly. Slovo robota bylo známo již v 17. století, ve významu otrocká práce podaných. Mírně pozměněné jej poprvé ve významu stroj použil český spisovatel Karel Čapek v divadelní hře R.U.R. Slovo mu poradil jeho bratr Josef Čapek, když se ho Karel ptal, jak umělou bytost pojmenovat. Původně zamýšlený labor zněl autorovi příliš papírově.
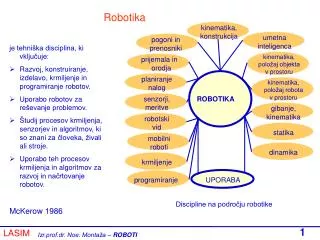
DĚLENÍ ROBOTŮ • stacionární – nemohou se pohybovat z místa na místo (například průmyslové manipulátory) • mobilní – mohou se přemisťovat
STACIONÁRNÍ ROBOTI Průmyslové manipulátory jsou dnes hojně využívány v mnoha odvětvích. V dnešní době je lze aplikovat do většiny výrobních procesů. Pro pohyb svého těla využívají většinou 6 os ale i více. 7. osa může být např. použita pro pohyb po koleji, kdy robot popojíždí vedle výrobku, synchronizován s dopravníkem a po vykonání úlohy se vrací zpět nebo pro sevření kleští při bodovém sváření.
MOBILNÍ ROBOTI • autonomní – na základě instrukcí samostatně vykoná nějakou úlohu, často využívá prvků umělé inteligence • dálkově ovládané – pracuje podle průběžných pokynů operátora, který získává zpětnou vazbu například pomocí virtuální reality
PODVOZKY MOB. ROBOTŮ • diferenciální podvozek • synchronní podvozek • trojkolový podvozek s řízeným předním kolem • Ackermanův podvozek • trojúhelníkový podvozek s třemi nezávisle poháněnými koly • podvozky se všesměrovými koly • pásové podvozky • kráčející podvozky
DRUHY ELEKTROMOTORŮ • stejnosměrný motor (DC motor) – nejjednodušší použití • střídavý motor (AC motor) – oproti DC motorům mají menší rozměry při dosažení stejného výkonu • servomotor – integrovaná převodovka a inkrementální enkodér
NAVIGACE MOB. ROBOTŮ • Dead reckoning • Sledování vodicí čáry (guidepath following) • Inerciální navigace • GPS • navigace pomocí taktilních (dotykových) a proximitních (bezdotykových) senzorů
DĚKUJI ZA POZORNOST BONUS