Download
1 / 11
110 likes | 266 Views
ATOVS/AVHRR Onboard MetOp-A: Validation and Use of Products Jörg Ackermann, Dieter Klaes, Eamonn McKernan, Francois Montagner, Thomas Heinemann, Peter Schlüssel, Rainer Schraidt, Lars Fiedler, Rüdiger Lang, Roberto Bonsignori Validation Tools Geolocation MHS Signal Simulation

E N D
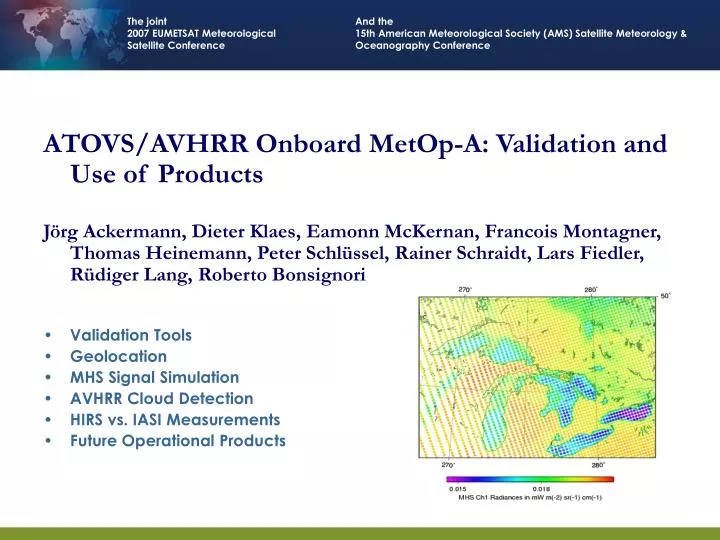
ATOVS/AVHRR Onboard MetOp-A: Validation and Use of Products Jörg Ackermann, Dieter Klaes, Eamonn McKernan, Francois Montagner, Thomas Heinemann, Peter Schlüssel, Rainer Schraidt, Lars Fiedler, Rüdiger Lang, Roberto Bonsignori Validation Tools Geolocation MHS Signal Simulation AVHRR Cloud Detection HIRS vs. IASI Measurements Future Operational Products
Validation Tools for ATOVS/AVHRR Prototype Product Processor (PT) Input: Level 0 data (MetOp CCSDS, NOAA HRPT, NOAA GAC) Actual TBUS or TLE for orbit propagation Output: Full set of ATOVS/AVHRR products + information about AVHRR geolocation accuracy Generation of pre-launch test data and reference data sets Comparison and Statistics Codes Input: Level 1B (EPS, NOAA, PT) or Level 2 products Output: RMS, bias, outlier detection of derived geophysical products Geolocation differences Cal/Val Facility in the EPS Ground Segment Visualisation of products Routine monitoring of instruments’ health
Geolocation of the Sounding Instruments Verification by visual inspection only => no sub-pixel accuracy Check Earth view measurements which are sensitive to the surface type HIRS Ch 20 or Ch 8 AMSU Ch 1 and Ch 15 MHS Ch 1
Geolocation of AVHRR • Nominal Scan Properties (Max. Scan Angle: 55.37 deg) • Comparison with the IASI imager Fiedler, 2006
Geolocation of AVHRR • Corrected Scan Properties (Max. Scan Angle: 55.20° Pitch: 0.117° Roll: -0.125° Yaw: -0.034°) • Comparison with the IASI imager Fiedler, 2006
Flight Direction MHS Signal Simulation Input: * Antenna pattern * Geometrical model of emitting and reflecting bodies in the MHS views Elevation Scan Nadir Azimuth 1 1 0 2 90 Earth Views Space Views Flight Direction Scan
MHS Signal Simulation Output: * Antenna correction In-Orbit Verification Results Bonsignori, 2006, 2007 SP1 SP0 SP2
AVHRR Cloud Detection 2 Bits for each individual test (failed/clear/cloudy) 4 Bits for 12 different test situations Reflectance Test Situation T4 Stdev T3 – T5 T4 – T3 T4 – T5 T4
AVHRR Cloud Detection Zonal Mean Cloud Fraction CFR from GOME-2 and from co-located AVHRR Cloud Scenes SCE Fast Retrieval Scheme for Clouds from the Oxygen A-Band (FRESCO) Ping Wang and Piet Stammes, KNMI, The Netherlands Lang, 2007
HIRS versus IASI Measurements IASI Radiances + HIRS Ch8 Response = Simulated HIRS Radiance Co-Location better than 10 km N=110
Future Operational Products and Plans ATOVS Level 2 still in the validation phase (Target: Dec. 2007) AVHRR Normalized Difference Vegetation Index (Target: Mid 2008) Polar cap winds from AVHRR (Target: End 2008) Other future plans: Sea Ice/Snow Coverage/Precipitation Rate from AMSU AVHRR SST and Ocean Currents ASCAT Winds for AMSU emissivity calculation in Level 2 processing AVHRR Aerosol Optical Depth (AOD) Refinement of AVHRR VIS channels calibration




![HTML5 Semantics, Accessibility & Forms [Carsonified HTML5 Online Conference]](https://cdn4.slideserve.com/7564742/slide1-dt.jpg)