Download
1 / 15
150 likes | 159 Views
Special English for Industrial Robot. URL : www.irobot-edu.com Mail : edubot_zhang@126.com. Unit01 Introduction of robot Unit02 Introduction of industrial robot Unit 0 3 Types of industrial robots Unit 0 4 ABB robot Unit 0 5 KUKA robot Unit 0 6 YASKAWA robot

E N D
Special English for Industrial Robot URL :www.irobot-edu.com Mail :edubot_zhang@126.com
Unit01 Introduction of robot • Unit02 Introduction of industrial robot • Unit03 Types of industrial robots • Unit04 ABB robot • Unit05 KUKA robot • Unit06 YASKAWA robot • Unit07 FANUC Robot • Unit08 SCARA robot • Unit09 Industry application of robot • Unit10 New robots • Unit11 Intelligent manufacturing and global robot developmentprogram • Unit12 The outlook for industrial robot 49PARTs
Unit 2 Introduction of industrial robot Task: • Part1 Main parts of industrial robot • Part2 Basic terms • Part3 Technical parameters • Part4 Kinematics and dynamics • Special English for Industrial Robot • Unit 2 Introduction of industrial robot • URL :www.irobot-edu.com Mail:edubot_zhang@126.com
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics The study of motion can be divided into kinematics and dynamics. Robot kinematics Robot kinematics applies geometry to the study of the movement of multi-degree of freedom kinematic chains that form the structure of robotic systems.The emphasis on geometry means that the links of the robot are modeled as rigid bodies and its joints are assumed to provide pure rotation or translation.
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Robot kinematics Robot kinematics studies the relationship between the dimensions and connectivity of kinematic chains and the position, velocity and acceleration of each of the links in the robotic system, in order to plan and control movement and to compute actuator forces and torques. A fundamental tool in robot kinematics is the kinematics equations of the kinematic chains that form the robot.
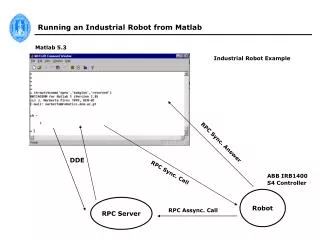
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Robot kinematics Forward kinematics uses the kinematic equations of a robot to compute the position of the end-effector from specified values for the joint parameters, as shown in Figure 2-3. The reverse process that computes the joint parameters that achieve a specified position of the end-effector is known as inverse kinematics, as shown in Figure 2-5. The dimensions of the robot and its kinematics equations define the volume of space reachable by the robot, known as its workspace.
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Position A Position B Where to move? How can move from position A to B? Figure 2-5 Inverse kinematics Figure 2-4 Forward kinematics
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Robot kinematics Forward kinematics specifies the joint parameters and computes the configuration of the chain. For serial manipulators this is achieved by direct substitution of the joint parameters into the forward kinematics equations for the serial chain. For parallel manipulators substitution of the joint parameters into the kinematics equations requires solution of the a set of polynomial constraints to determine the set of possible end-effector locations.
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Robot kinematics Inverse kinematics specifies the end-effector location and computes the associated joint angles. For serial manipulators this requires solution of a set of polynomials obtained from the kinematics equations and yields multiple configurations for the chain. For parallel manipulators, the specification of the end-effector location simplifies the kinematics equations, which yields formulas for the joint parameters.
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Robot kinematics Forward kinematics refers to the calculation of end effector position, orientation, velocity, and acceleration when the corresponding joint values are known. Inverse kinematics refers to the opposite case in which required joint values are calculated for given end effector values, as done in path planning.
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Robot dynamics Forward dynamics refers to the calculation of accelerations in the robot once the applied forces are known. Forward dynamics is used in computer simulations of the robot. Inverse dynamics refers to the calculation of the actuator forces necessary to create a prescribed end-effector acceleration. This information can be used to improve the control algorithms of a robot.
Unit 2. Introduction of industrial robot 8 Part4 Kinematics and dynamics Vocabulary
书 名:工业机器人专业英语 出 版 社:华中科技大学出版社 配套资源 教学视频:海渡学院APP(免费观看) 教学课件:工业机器人教育网(http://college.irobot-edu.com/videoOnline/vid.aspx?s=47) 习 题:联系edubot_zhang@126.com ← 扫一扫微店购书: 九大系列教材 最新出版上架信息 更多资源 网址:www.irobot-edu.com 邮箱:edubot_zhang@126.com 源自哈尔滨工业大学 专注工业机器人教育
哈工海渡 海渡学院APP 工业机器人 教育网 专业建设 尹老师:138-1284-1806 喻老师:158-5270-3086 培训服务俞老师:152-5252-1235 郑老师:187-5513-0658 工业机器人技术交流QQ群:313623823 E-mail : edubot@hitrobotgroup.com 哈工海渡:www.edubot.cn 海渡学院:www.edubotcoll.com 工业机器人教育网:www. Irobot-edu.com 网址:www.irobot-edu.com 邮箱:edubot_zhang@126.com 源自哈尔滨工业大学 专注工业机器人教育
THANK YOU www.irobot-edu.com edubot_zhang@126.com