Download
1 / 41
590 likes | 1.03k Views
UNI EN ISO 13849-1: i circuiti di comando e la sicurezza sulle macchine. Angelo Maggioni Quadra S.r.l. www.quadrasrl.net. Allegato I, Direttiva 2006/42/CE Sicurezza ed affidabilità dei sistemi di comando (§1.2.1).

E N D
UNI EN ISO 13849-1: i circuiti di comando e la sicurezza sulle macchine Angelo Maggioni Quadra S.r.l. www.quadrasrl.net
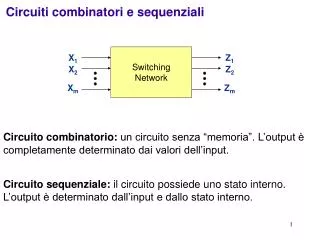
Allegato I, Direttiva 2006/42/CESicurezza ed affidabilità dei sistemi di comando (§1.2.1) • I sistemi di comando devono essere progettati e costruiti in modo da evitare l'insorgere di situazioni pericolose. In ogni caso essi devono essere progettati e costruiti in modo tale che: • resistano alle previste sollecitazioni di servizio e agli influssi esterni, • un'avaria nell'hardware o nel software del sistema di comando non crei situazioni pericolose, • errori della logica del sistema di comando non creino situazioni pericolose, • errori umani ragionevolmente prevedibili nelle manovre non creino situazioni pericolose.
Proroga norma UNI EN 954-1:1998 • Con la “Comunicazione della Commissione nell’ambito dell’applicazione della direttiva 2006/42/CE del Parlamento europeo e del Consiglio, relativa alle macchine e che modifica la direttiva 95/16/CE (rifusione) 2009/C 321/09”, pubblicata sulla Gazzetta ufficiale dell’Unione europea C 321 del 29/12/2009, è stata prolungata la data di cessazione della presunzione di conformità della norma UNI EN 954-1:1998 (inizialmente prevista per il 28/12/2009) al 31/12/2011.
Norme armonizzate PL SIL • UNI EN ISO 13849-1 (2008): Sicurezza del macchinario. Parti dei sistemi di comando legate alla sicurezza. Parte 1: principi generali per la progettazione. • CEI EN 62061 (2005): Sicurezza del macchinario. Sicurezza funzionale dei sistemi di comando e controllo elettrici, elettronici ed elettronici programmabili correlati alla sicurezza.
Applicazione raccomandata delle norme CEI EN 62061 & UNI EN ISO 13849-1
DefinizioniUNI EN ISO 13849-1 • Parte del sistema di comando correlata alla sicurezza – SRP/CS (Safety Related part of Control System) • Parte di un sistema di comando che risponde a segnali di ingresso legati alla sicurezza e genera dei corrispondenti segnali di uscita legati alla sicurezza • Guasto pericoloso (Dangerous failure) • Guasto che può potenzialmente portare la SRP/CS in uno stato pericoloso o non in grado di effettuare la sua funzione. • Livello di prestazione – PL (Performance Level) • Livello discreto usato per specificare l’abilità di un sistema di comando legato alla sicurezza di effettuare una funzione di sicurezza in determinate condizioni • Livello di prestazione richiesto – PLr (required Performance Level) • Livello di prestazione (PL) applicato in modo da raggiungere i requisiti richiesti per quanto riguarda la riduzione dei rischi
Processo iterativo per la progettazione della SRP/CSUNI EN ISO 13849-1
Misure protettive per la riduzione del rischioUNI EN ISO 13849-1 • Le misure protettive per la riduzione del rischio che dovrebbero essere applicate sono: • riduzione della probabilità di guasti a livello dei componenti; lo scopo è quello di ridurre la probabilità di guasti che possano compromettere le funzioni di sicurezza; ciò può essere fatto aumentando l’affidabilità dei componenti, per esempio con la selezione di componenti testati o progettati secondo metodologie comprovate in modo da ridurre o escludere guasti critici • miglioramento della struttura della SRP/CS; lo scopo è quello di evitare gli effetti pericolosi di un guasto; per questo scopo può essere utile l’utilizzo di una struttura ridondante e/o monitorata • Entrambe queste soluzioni possono essere applicate singolarmente o in modo combinato
PL richiesto (PLr) • Per ogni funzione di sicurezza che deve essere svolta da una SRP/CS, si deve determinare e documentare un livello di prestazione richiesto (PLr). La determinazione del PLr è il risultato della valutazione dei rischi e si riferisce all’entità della riduzione del rischio a carico delle parti del sistema di comando legate alla sicurezza. • Quanto maggiore è l’entità della riduzione del rischio richiesta da parte della SRP/CS, tanto più elevato deve essere il PLr. • La valutazione del rischio prende in considerazione una situazione precedente alla messa in atto della funzione di sicurezza prevista; la riduzione del rischio mediante altre misure tecniche indipendenti dal sistema di comando (per esempio ripari fissi) o funzioni di sicurezza aggiuntive, può essere considerata nella determinazione del PLr.
Grafico per la determinazione del PLr per la funzione di sicurezzaUNI EN ISO 13849-1 – Allegato A
Stima del PLUNI EN ISO 13849-1 Il PL della SRP/CS deve essere determinato stimando i seguenti aspetti: MTTFd di ciascun componente [appendici C e D]; DC (copertura diagnostica) [appendice E]; architettura e comportamento della funzione di sicurezza in condizioni di avaria [punto 6]; CCF (guasti di causa comune) [appendice F]; software legato alla sicurezza [punto 4.6 e appendice J]; guasti sistematici [appendice G]; capacità di eseguire la funzione di sicurezza nelle condizioni ambientali previste.
Tempo medio ad un guasto pericoloso (MTTFd)UNI EN ISO 13849-1 Il valore del MTTFd per ogni canale è espresso in tre livelli (vedi tabella); dovrebbero essere tenuti in considerazione i valori di ogni canale preso singolarmente (ad esempio singolo canale oppure ogni canale di un sistema ridondante). Per il MTTFd, viene preso in considerazione un tempo massimo di 100 anni.
Tempo medio ad un guasto pericoloso (MTTFd)UNI EN ISO 13849-1 Per la stima del MTTFd di un componente, si possono utilizzare, nell’ordine dato, i seguenti criteri: utilizzare i dati forniti dal costruttore; utilizzare i metodi esposti in allegato C ed in allegato D; scegliere un tempo di 10 anni.
Norme che trattano MTTFd o B10d dei componentiUNI EN ISO 13849-1 – Allegato C - Paragrafo C.2
Calcolo e valutazione del MTTFd UNI EN ISO 13849-1 – Allegato C – Paragrafo C.4 • Per i componenti pneumatici, meccanici ed elettromeccanici, il parametro B10d è il numero di cicli in cui il 10% dei componenti si guasta pericolosamente dove nop è il numero di operazioni all’anno • Il tempo medio entro il quale il 10% dei componenti pneumatici, meccanici ed elettromeccanici si guasta pericolosamente è dato da • La relazione con il tempo medio al guasto pericoloso è la seguente
Metodo semplificato per la stima del MTTFd per ogni canale UNI EN ISO 13849-1 – Allegato D Il valore di MTTFd di tutti i singoli componenti che compongono un canale sono usati nel calcolo MTTFd è quello complessivo dell’intero canale MTTFdi, MTTFdj è il MTTFd di ogni componente che ha un ruolo nell’esecuzione della funzione di sicurezza La prima somma è quella in cui i componenti hanno valori di MTTFdi diversi tra di loro; la seconda è quella in cui gli nj componenti hanno MTTFdj identici
MTTFd per diversi canali, simmetrizzazione del MTTFd per ogni canale In una SRP/CS ridondante, se il valore del MTTFd è lo stesso per ogni canale il valore complessivo è il medesimo di quello dei canali. Se il MTTFd dei canali differisce, ci sono due possibilità: deve essere utilizzato il valore più basso come assunzione del caso peggiore; la seguente equazione può essere usata per stimare il valore di MTTFd assumibile per ogni canale: dove MTTFd C1 e MTTFd C2 sono i due valori dei canali ridondanti Metodo semplificato per la stima del MTTFd per ogni canale UNI EN ISO 13849-1 – Allegato D
Copertura diagnostica (DC)UNI EN ISO 13849-1 • Il valore di DC viene espresso in quattro livelli (vedi tabella) • Per la stima di DC, nella maggior parte dei casi la failure mode and effects analysis (FMEA) o metodi simili possono essere utili. In questo caso tutti i guasti rilevanti o i modi di guasto possono essere considerati. • In alternativa, è possibile utilizzare il metodo semplificato, sottoforma di tabella, riportato in Allegato E.
Criteri di stima della copertura diagnostica mediaUNI EN ISO 13849-1 – Allegato E
Procedura semplificata per la stima del PLUNI EN ISO 13849-1 • Per una stima più semplice del PL possono essere fatte le seguenti assunzioni se l’architettura utilizzata rientra in quelle riportate al §6.2 della norma UNI EN ISO 13849-1: • un tempo di utilizzo di 20 anni; • un tasso di guasto costante per tutto il periodo di utilizzo; • per una categoria 2, un rapporto rd ≤ 1/100 rt; • per una categoria 2 un MTTFd,TE maggiore della metà del MTTFd,L. • MTTFd,TE = MTTFd del componente che esegue il test per la rilevazione dei guasti • MTTFd,L = MTTFd del componente che esegue le funzioni della SRP/CS • Il PL di ogni SRP/CS dipende dall’architettura, dal MTTFd per ogni canale e dal DCavg. • Nel caso di architetture con PLr da aac, le misure per evitare i guasti possono essere sufficienti; per applicazioni con rischi maggiori, PLr da d a e, la struttura della SRP/CS deve prevedere misure per evitare, individuare e tollerare i guasti. • Misure pratiche includono la ridondanza, la diversità e il monitoraggio. • Per le categorie 2, 3 e 4, devono essere previste sufficienti misure per la riduzione dei guasti di causa comune (CCF).
Procedura semplificata per la stima del PLUNI EN ISO 13849-1 MTTFd basso MTTFd medio MTTFd alto
Esempio di calcolo – Riparo mobile interbloccato • Funzione di sicurezza: arresto del funzionamento del motore all’apertura di un riparo mobile • Il riparo è interbloccato per mezzo di due microinterruttori (B1 e B2) il cui segnale viene portato in ingresso ad un modulo di sicurezza (K1) • La concordanza dei sensori di ingresso viene monitorata dal modulo di sicurezza che in questo modo rileva eventuali guasti dei sensori • I teleruttori (Q1 e Q2) tolgono l’alimentazione al motore; i contattori vengono monitorati inserendo contatti nel circuito di ripristino del modulo di sicurezza • Il guasto di un singolo componente non comporta la perdita della funzione di sicurezza
Dati forniti dal costruttore • Il modulo di sicurezza viene dichiarato dal costruttore conforme alla categoria 4, PL e (oppure SIL 3) e PFHD,K1=2,3110-9 • B10d,B1= 1.000.000 cicli • B10d,B2= 500.000 cicli • nop= 35.040 (365 giorni, 24 ore/giorno, top=900 s) • B10d,Q1=B10d,Q2=2.000.000 cicli • Q1 e Q2 sono teleruttori a contatti legati
CalcoliUNI EN ISO 13849-1 • MTTFd,Q1= 570,77 anni • MTTFd,Q2= 570,77 anni • MTTFd,B1= 285,38 anni • MTTFd,B2= 142,69 anni • T10d,Q1= 57 anni • T10d,Q2= 57 anni • T10d,B1= 28,5 anni • T10d,B2= 14,2 anni (componente da sostituire prima del mission time)
CalcoliUNI EN ISO 13849-1 • DCB1 = DCB2 = 99% controllo della concordanza dei segnali in ingresso
CalcoliUNI EN ISO 13849-1 • DCQ1 = DCQ2 = 99% monitoraggio diretto da parte del modulo di sicurezza grazie alla retroazione ed ai contatti legati
Calcolo sottosistemiUNI EN ISO 13849-1 • Sottosistema 1 (sensori B1 e B2) • Si applica la limitazione dei canali a 100 anni • MTTFd = 100 anni (alto) • DC = 99% (alta) • Categoria 4 • PL = ePFHD =2,4710-8
Calcolo sottosistemiUNI EN ISO 13849-1 • Sottosistema 3 (contattori Q1 e Q2) • Si applica la limitazione dei canali a 100 anni • MTTFd = 100 anni (alto) • DC = 99% (alta) • Categoria 4 • PL = ePFHD =2,4710-8
Risultato finaleUNI EN ISO 13849-1 • Per ottenere il valore finale si sommano i valori di PFHD dei singoli sottosistemi • PFHD,totale= PFHD,B1//B2+PFHD,K1+PFHD,Q1//Q2 = = (2,47 + 0,231 + 2,47)10-8 = 5,17110-8 PL = e
Esclusione di guastiUNI EN ISO 13849-1 • Non è sempre possibile valutare gli SRP/CS senza escludere determinati guasti. Per l’esclusione dei guasti fare riferimento alla norma UNI EN ISO 13849-2. • La norma UNI EN ISO 13849-2 riporta un elenco dei guasti che è possibile escludere suddivisi a seconda della tecnologia (meccanica, pneumatica, idraulica ed elettrica). • L’esclusione di guasti è un compromesso tra i requisiti di sicurezza e la teorica possibilità di accadimento di un guasto. • L’esclusione di un guasto può essere basata su: • improbabilità tecnica di avere un certo tipo di guasto, • esperienza tecnica comunemente accettata, indipendente da un particolare tipo di applicazione, • requisiti tecnici relativi all’applicazione e a specifici rischi.
Esclusione di guastiISO/TR 23849:2010 • Non è opportuno che il raggiungimento di un PL pari ad “e” sia basato unicamente sull’esclusione di guasti (ISO/TR 23849:2010); in generale, è necessario essere sempre più critici sulla possibilità di escludere un guasto al crescere del livello di prestazione richiesto. • In generale, l’esclusione dei guasti non dovrebbe essere applicabile agli aspetti meccanici dei microinterruttori di interblocco e degli interruttori azionati manualmente (ad es. comando di arresto di emergenza). • Le esclusioni dei guasti permesse per i guasti di tipo meccanico sono descritti dalla norma UNI EN ISO 13849-2.
Esempio – Riparo mobile interbloccato • Funzione di sicurezza: arresto del funzionamento del motore all’apertura di un riparo mobile interbloccato con un microinterruttore a spinetta
Esempio – Riparo mobile interbloccato • Il riparo è interbloccato per mezzo di n. 1 microinterruttore B con n. 2 contatti (B1 e B2) il cui segnale viene portato in ingresso ad un modulo di sicurezza. • Non escludendo il guasto di tipo meccanico (ad esempio allentamento della camme) del microinterruttore, la SRP/CS nel suo complesso è in categoria 1. • Eseguendo gli opportuni calcoli, si ottiene: PFHd,totale= 1,1710-6 PL = c
Esempio – Riparo mobile interbloccato • Il riparo è interbloccato per mezzo di n. 1 microinterruttore B con n. 2 contatti (B1 e B2) il cui segnale viene portato in ingresso ad un modulo di sicurezza. • Escludendo il guasto di tipo meccanico del microinterruttore, la SRP/CS nel suo complesso è in categoria 4. • Eseguendo gli opportuni calcoli, si ottiene: PFHd,totale= 5,17110-8 PL = e