Download
1 / 90
960 likes | 1.29k Views
Chapter 6 Discrete-Time System. 1. Discrete time system. Operation of discrete time system. where and are multiplier D is delay element. Fig. 6-1. 2. Difference equation. Difference equation. where and is constant or function of n. Example 6-1 Moving average

E N D
1. Discrete time system • Operation of discrete time system where and are multiplier D is delay element Fig. 6-1.
2. Difference equation • Difference equation where and is constant or function of n
Example 6-1 • Moving average • Example 6-2 • Integration If If
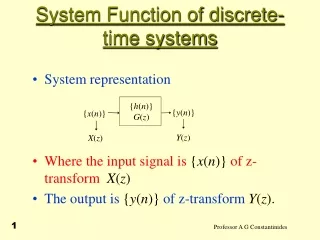
3. Linear time-invariant system • Functional relationship of discrete time system Fig. 6-2. where is impulse response of system
The system is said to be linear if • The system is said to be time-invariant if
Form and transfer function • Difference equation of discrete time system After z-transform
Transfer function If where is impulse response of system
Impulse response of discrete time system If is power series In this case,
Example 6-3 Using power series
Using other method Substitute , and initial value
Example 6-4 Using z-transfrom Using inverse z-transfrom
If initial value Using inverse z-transfrom
System stability • BIBO(bounded input, bounded output)
Raible tabulation Table 6-1. Raible’s tabulation
If part or all factor is 0 in the first row, then this table is ended • Singular case • Using substitution n th order case
4. Description of Pole-Zero • Discrete time system transfer function H(z) where K is gain Poles of at : Zeros of at :
Description of pole and zero in z-plane Fig. 6-3.
Example 6-8 Fig. 6-4.
Example 6-9 Fig. 6-5. K=0.2236
5. Frequency response • Frequency response of system • Method for calculation • Method for geometric calculation
Example 6-10 • Method for calculation • Substitution of and using Euler’s formular
Method for geometric calculation Magnitude response Phase response Fig. 6-7.
6. Realization of system Unit delay Adder/subtractor Constant multiplier Branching Signal multiplier Fig. 6-8.
Direct form • Direct form 1
(a) (b) Fig. 6-9.
Direct form 2 Inverse transform poles zeros
(a) (b) Fig. 6-10.
Example 6-11 • Direct form 1 • Direct form 2
(a) (b) Fig. 6-11.
Quantization effect of parameters • Quantization error of parameters • Input signal quantization • Accumulation of arithmetic roundoff errors • Coefficient of transfer function quantization
Cascade and parallel canonic form • Cascade canonic form or series form first order second order
Fig. 6-12. (a) (b) Fig. 6-13.
Parallel canonic form first order second order
(a) (b) Fig. 6-15.
Example 6-12 • Cascade canonic form Quantization error of parameter is decreased
(a) (b) Fig. 6-16.
Example 6-13 Fig. 6-17.
Example 6-14 Substitute
FIR system • Direct form • Tapped delay line structure or transversal filter Fig. 6-19.
Cascade canonic form where Fig. 6-20.