Download
1 / 28
280 likes | 396 Views
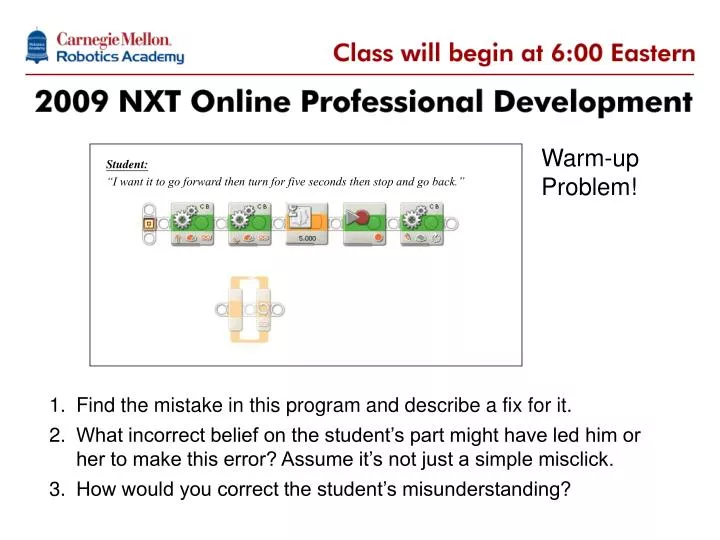
Student: “I want it to go forward then turn for five seconds then stop and go back.”. NXT-G Online Professional Development Classes will begin at 3:30pm EDT. Warm-up Problem!. Find the mistake in this program and describe a fix for it.

E N D
Student: “I want it to go forward then turn for five seconds then stop and go back.” NXT-GOnline Professional DevelopmentClasses will begin at 3:30pm EDT Warm-up Problem! • Find the mistake in this program and describe a fix for it. • What incorrect belief on the student’s part might have led him or her to make this error? Assume it’s not just a simple misclick. • How would you correct the student’s misunderstanding?
Slalom Challenge • How was it? • Line Tracking questions? • What problems did you encounter? • Slowed it down too far • Thin tape, robot overshoots • Fatter tape! • Don’t stretch out the electrical tape
Troubleshooting 4-2 • What is the student trying to do?
Troubleshooting 4-2 • What was wrong? (Use your marker) Doesn’t move past the line before turning Moves a set distance each time instead of Unlimited; “jams” the loop!
Troubleshooting 4-1 “It should go forward for one second, then turn until it sees the wall, but it doesn’t ever turn.” • Focus on the misconception • What is it? • How would you guide a student to a correct understanding?
Student: “I want it to go forward then turn for five seconds then stop and go back.” What happened here? • Not all problems are on the code level • Treating this as a “program” problem is doomed • There’s more to programming than programs! “Kobayashi Maru” problem
What’s Wrong? • Misunderstandings occur at many levels • If you take the problem at face value... • This isn’t a “picked the wrong mode” problem • Student misunderstanding is on the level of behavior planning and selection • What is a good way to do planning?
Obstacle Course Prep • Re-view: NVT Obstacle Course 1 • What is the first problem solving technique? • Analysis • Break down the problem into smaller pieces • What is the second problem solving technique? • Iterative Design • Build the solution around each piece in order • The secret to programming is not-programming • Failing to plan is… • … planning to fail
Analysis • NVT Obstacle Course 2-3 • Break the problem down into steps • Steps 1-5 match the stated objectives • Review your analysis • What did we find? • We missed some… • Add them in (2.5 and 3.5) • Work in Progress!
Iterative Design • NVT Obstacle Course 4-5 • Failed approaches • Everything at once • Fails why? • Everything in pieces • Fails why? • Iterative approach • Do one step • Test • Do next step; repeat
Solve the Problem • Complete the challenge • DON’T use steps 6-8 in the video! • Abbreviated Journal Assignment • Present (1 min) on one interesting problem you found and solved • Compressed version of multi-day class work session • Checkpoints • Each time you reach a whole-numbered objective, write the number of the objective in chat (private to me if you want) • If you get done early… • Formalize your presentation about the problem in your journal
Presentations “One interesting problem you found and solved” • Present your experience • Would you like to use visuals or just audio? • 1 minute limit per presenter
Engineering in the Classroom • Project-based learning • Context • Teamwork • Problem solving • Time management
Engineering in the Classroom • Supports groups working at different paces • Checkpoints • Formative feedback for pacing • Mitigate off-course errors • Documentation (Journal + Presentation) • Summative and formative feedback • Reflective practice • Concrete progress • Every group can see and gauge its progress • Deadlines and performance are not arbitrary
What can you teach with a robot? So far: • Science, Technology, Engineering, Mathematics • Programming, Automation • Algebra, physics • Money, jobs • Teamwork, problem solving, social skills, creativity, expression, high level thinking, decision making • Documentation, technical lingo, reading and writing technical material • Scaling (math) • Programming logic • Data logging, analysis • Color (wavelengths of light) • Thresholds (cutoffs) Add new ideas here
Choose your Challenge • NVT Challenges • Choose one Challenge for homework • Different skills, different focuses
Homework • Complete the Additional Challenge you picked • Document one interesting problem+solution you encounter • Post your solution and journal entry in the Wk5 area • Poster Assignment • Identify one critical concept we have covered (or is related to something we have covered), that you think will be most useful to your students • Create a poster in any format you want that will help to explain the concept to your students • Some format ideas: Real paper (take a picture), digital paper, PowerPoint, HTML, Flash, blog entry…
Closing Thoughts • Class activity: Review • Line Following • Troubleshooting revisited • Class activity: Problem Solving • Teacher concept: More to Programming than Programs • Engineering concept: Analyzing a problem • Engineering concept: Iterative Design • Class activity: Engineering • Class concept: Journaling and Presenting • Teacher concept: Engineering in the Classroom
Poster Notes • Concept examples • Program flow • Line tracking explained • How to find a threshold • The Three Commandments of Switch-Loops • Meta-concept examples • Why sensors matter to robots • Iceberg: Surface Problem vs. Real Problem • Top 10 Real Math opportunities in NXT-G robotics
Bonus: Types of Mistakes • Syntax • Mechanical structure of the program • Move Block: Motor C, unlimited, 75% power • Robot Semantics • Meanings of those commands • Turn on the robot’s left motor at 75% power • Context, Intent, and Planning • Higher level semantics • Effects in environmental context • Intended effects
Syntax Errors • Illegal formation of commands • Syntax mistakes are hard to make in NXT-G • Example: Disconnected icon
Robot-Semantic Errors • Mistakes about the meaning of a command • Example: Duration vs. Unlimited • Student does not realize program flow implications and uses Duration in a Forward until Touch behavior • Example: Reversed motors (L/R) • Student misinterprets Motor C as the right motor, and the robot turns the wrong way
Environment-Semantic(Context) Errors • Mistakes because of environmental constraints or conditions • Example: Light Sensor threshold • Student calculates threshold in morning, runs in afternoon • Example: Sharpness of line track • Student’s robot does not turn hard enough in a line track and the robot “loses” the line going around a curve
Program-Intent Mismatch Errors • Mistakes because student chooses an inappropriate programmed behavior for a desired robot effect • Example: Wrong way • Student tries to copy-paste a left-side line track, but takes a similar-looking right-side track instead and the robot goes the wrong way at a fork • Example: Wrong wait • Student tries to implement an obstacle-detection behavior using Wait Blocks
Problem-Semantic (Planning) Errors • Mistakes because student’s intended action is incorrect • Example: Wrong Turn • Student misreads the board and plans a left turn instead of a right turn • Example: Missing Step • Student wants to move two dark lines, but does not move clear of the first dark line before looking for the second