Download
1 / 15
160 likes | 200 Views
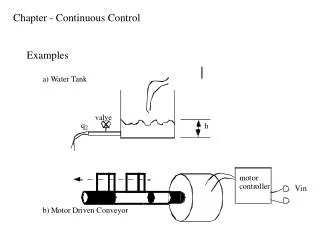
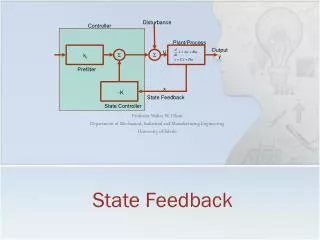
Observer Design & Output Feedback. Review of state feedback control State estimation Illustrative example Chemical reactor example Separation principle Simulink example. State Feedback Control. Linear state-space model State feedback control law K is the controller gain matrix

E N D
Observer Design & Output Feedback • Review of state feedback control • State estimation • Illustrative example • Chemical reactor example • Separation principle • Simulink example
State Feedback Control • Linear state-space model • State feedback control law • K is the controller gain matrix • Requires measurement of all state variables
x(t) Unmeasured state variables Process u(t) y(t) State Feedback Controller Measured output variables Observer Estimated state variables State Estimation • Motivation • State variables are often unmeasured • Implement control law with estimated state variables • State estimator • State-space model & available measurements used to estimate unmeasured state variables • Often called a state observer
Luenberger Observer • State-space model • Linear observation equation • Observer form • L is the observer gain matrix to be determined
Observer Error Dynamics • Error dynamics described by linear ODE • Stability of error equation determined by eigenvalues of the matrix A-LC • The eigenvalues can be affected by the observer gain matrix L
Observer Design • Objective is to choose L such that l(A-LC) are placed at desired locations • Observer characteristic equation • Coefficients are functions of the observer gain matrix elements • Desired observer characteristic equation • Equate coefficients with like powers of l to determine L • Only possible if system is observable
Observability • Eigenvalues of observer error dynamics can be placed arbitrarily iff system is observable • Single output (p = 1) • Observability matrix • System is observable iff WO is nonsingular • Multiple outputs (p > 1) • Observability matrix: • System is observable iff rank(WO) = n
Illustrative Example • Linear model • Observability
Illustrative Example cont. • Characteristic equation • Desired characteristic equation • Observer gains
Chemical Reactor Example • Mass and energy balance equations • Linearized model
Reactor Observer Design • Observability • System is observable • Observer design • Observer eigenvalues • Desired observer eigenvalues • Observer gains:
Separation Principle • State feedback based on state estimate • Combined system • Controller design ensures A-BK has stable eigenvalues • Observer design ensures A-LC has stable eigenvalues • Block diagonal structures ensures overall system stability • Design controller & observer independently
Illustrative Example Revisited • Controller • Observer • Combined system
Simulink Example >> a=[-1 1; 2 -4]; >> b=[1; 0]; >> c=[1 0]; >> d=0; >> p=[-0.3; -0.4]; >> k=place(a,b,p) k = -4.3000 7.6600 >> wo=obsv(a,c) wo = 1 0 -1 1 >> rank(wo) ans = 2 >> p=[-9; -10]; >> l=place(a',c',p)' l = 14.0000 32.0000