Download
1 / 94
940 likes | 1.04k Views
反馈控制是现实物理过程中的一个基本现象。反馈控制方法的采用是为了准确地调整某一个系统或单元的某些状态参数。 如采用反馈控制方法稳定放大器增益是反馈控制在电子线路领域最典型的应用之一。 为稳定系统状态而采用的反馈控制系统是一个负反馈系统。它由下图所示的三部分组成。. 图 7-1 反馈控制系统的组成. 整个系统的功能就是使输出状态跟踪输入信号(基准)或它的平均值的变化。控制过程总是使调整后的误差以与起始误差相反的方向变化,结果逐渐减小绝对误差,最终趋向于一个极限值。 根据控制状态参数的不同,在高频电路中,反馈控制电路可分为四类:

E N D
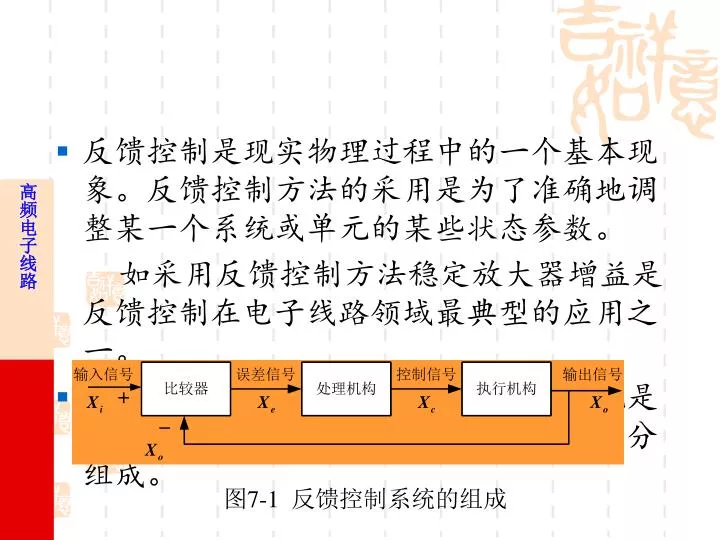
反馈控制是现实物理过程中的一个基本现象。反馈控制方法的采用是为了准确地调整某一个系统或单元的某些状态参数。反馈控制是现实物理过程中的一个基本现象。反馈控制方法的采用是为了准确地调整某一个系统或单元的某些状态参数。 如采用反馈控制方法稳定放大器增益是反馈控制在电子线路领域最典型的应用之一。 • 为稳定系统状态而采用的反馈控制系统是一个负反馈系统。它由下图所示的三部分组成。 图7-1 反馈控制系统的组成
整个系统的功能就是使输出状态跟踪输入信号(基准)或它的平均值的变化。控制过程总是使调整后的误差以与起始误差相反的方向变化,结果逐渐减小绝对误差,最终趋向于一个极限值。整个系统的功能就是使输出状态跟踪输入信号(基准)或它的平均值的变化。控制过程总是使调整后的误差以与起始误差相反的方向变化,结果逐渐减小绝对误差,最终趋向于一个极限值。 • 根据控制状态参数的不同,在高频电路中,反馈控制电路可分为四类: • 自动增益控制(AGC):调整输出电压振幅 • 自动功率控制(APC):调整功率放大器输出功率 • 自动频率控制(AFC):调整振荡信号的频率 • 自动相位控制(PLL):调整振荡信号的相位
学习项目七 反馈控制电路 • 7.1 自动增益控制电路 • 7.2 自动频率控制电路 • 7.3 锁相环路 • 7.4 频率合成器
7.1 自动增益控制电路 • 具有AGC电路的接收机组成框图如下图所示。 图7―2 具有AGC电路的接收机组成框图
7.1.1 工作原理 • 自动增益控制是用负反馈控制的方法动态地调整放大器的增益,使得输入电压幅度在相当大的范围内变化时,放大器输出电压振幅的平均值能基本保持恒定。 • 设输入信号振幅为Ui,输出信号振幅为Uo,可控增益放大器增益为Kv(uc),它是控制电压uc的函数,则有 • 自动增益控制电路框图如图7-3所示。 (7―1)
7.1.2 自动增益控制电路 根据输入信号的类型、特点以及对控制的要求,AGC电路主要有以下几种类型。 1.简单AGC电路 • 在简单AGC电路里,参考电平Ur=0。这样,只要输入信号振幅Ui增加,AGC的作用就会使增益Kv减小,从而使输出信号振幅Uo减小。图7―4为简单AGC的特性曲线。 • 简单AGC电路的优点是线路简单,在实用电路中不需要电压比较器;主要缺点是,一有外来信号,AGC立即起作用,接收机的增益就受控制而减小,这对提高接收机的灵敏度是不利的,尤其在外来信号很弱时。故简单AGC电路适用于输入信号振幅较大的场合。
2.延迟AGC电路 • 在延迟AGC电路里有一个起控门限,即比较器参考电压Ur,它对应的输入信号振幅Uimin,如图7―5所示。 图7―6 延迟AGC电路
7.1.3 放大器的增益控制 • 由于高频放大器的谐振增益为: 从上式可知放大器的增益与晶体管的正向传输导纳 成正比,而 的大小与晶体管的工作点电流IQ有关。因此,通过改变晶体管发射极电流IE,可以改变 ,从而实现改变放大器的电压增益Au0。 • 晶体管的-特性曲线如图7-7所示。从曲线可知AGC分正向AGC和反向AGC,相应的电路中AGC控制电压应分别加在晶体管的基极和发射极,即可实现放大器的增益控制。 (7-2)
7.2 自动频率控制电路7.2.1 工作原理 • 自动频率控制(AFC)电路由频率比较器、低通滤波器和可控频率器件三部分组成,如图7―8所示。 • 频率比较器通常是鉴频器,参考频率ωr与鉴频器的中心角频率ω0相等。 • 可控频率器件通常是压控振荡器(VCO),其输出振荡角频率可写成 • 自动频率控制电路是利用误差信号的反馈作用来控制被稳定的振荡器频率,使之稳定。误差信号是由鉴频器产生的,它与鉴频器的两个输入信号频率差成正比,显然达到最后稳定状态时,两个频率不可能完全相等,必定存在剩余频差: 。 (7―3)
7.2.2 应用 自动频率微调电路(简称AFC电路) • 图7―9是一个调频通信机的AFC系统的方框图。这里是以固定中频fI作为鉴频器的中心频率,亦作为AFC系统的标准频率。 • 当混频器输出差频 不等于fI时,鉴频器即有误差电压输出,通过低通滤波器,得到直流电压输出,用来控制本振(压控振荡器),从而使f0改变,直到 减小到等于剩余频差为止。这固定的剩余频差叫做剩余失谐。
7.3 锁相环路7.3.1 工作原理 锁相环PLL(Phase-Locked Loop)是一个相位负反馈控制系统。它由鉴相器(Phase Detector,缩写为PD)、环路滤波器(Loop Filter,缩写为LF)和电压控制振荡器(Voltage Controlled Oscillator,缩写为VCO)三个基本部件组成,如图7―10所示。 图7―10 锁相环的基本构成
(7―4) 设参考信号为 若参考信号是未调载波时,则θr(t)=θr=常数。设输出信号为 (7―5) 两信号之间的瞬时相差为 (7―6) 由频率和相位之间的关系可得两信号之间的瞬时频差为 (7―7)
(7―8) 锁定后两信号之间的相位差表现为一固定的稳态值。即 此时,输出信号的频率已偏离了原来的自由振荡频率ω0(控制电压uc(t)=0时的频率),其偏移量由式(7―7)和(7―8)得到为 (7―9) 这时输出信号的工作频率已变为 (7―10)
由上可知,锁相环路是通过对相位的控制来实现对频率的控制,可以实现无误差的频率跟踪。它与自动频率控制电路一样都是实现频率跟踪的自动控制电路,但自动频率控制电路只能实现有固定频差的频率跟踪。由上可知,锁相环路是通过对相位的控制来实现对频率的控制,可以实现无误差的频率跟踪。它与自动频率控制电路一样都是实现频率跟踪的自动控制电路,但自动频率控制电路只能实现有固定频差的频率跟踪。
7.3.2 基本环路方程 1.鉴相器 • 鉴相器(PD)又称为相位比较器,它是用来比较两个输入信号之间的相位差θe(t)。鉴相器输出的误差信号ud(t)是相差θe(t)的函数,即ud(t)=f[θe(t)] 。 • 鉴相器按其鉴相特性可分为正弦型、三角型和锯齿型等。图7-11所示的是正弦鉴相器,它由模拟乘法器与低通滤波器串接而成。 图7―11 正弦鉴相器模型
若以压控振荡器的载波相位ω0t作为参考,将输出信号uo(t)与参考信号ur变形若以压控振荡器的载波相位ω0t作为参考,将输出信号uo(t)与参考信号ur变形 (7―11) (7―12) 式中,θ2(t)=θ0(t), (7―13) 将uo(t)与ur(t)相乘,经低通滤除2ω0分量,可得 (7―14) • 由(7-14)可得正弦鉴相器的数学模型如图7-12所示,鉴相特性如图7-13所示。Ud在一定程度上反映了鉴相器的灵敏度。
2.环路滤波器 • 环路滤波器(LF)是一个线性低通滤波器,用来滤除误差电压ud(t)中的高频分量和噪声,更重要的是它对环路参数调整起到决定性的作用。 • 环路滤波器的模型如图7-14所示。 图7―14 环路滤波器的模型 (a)时域模型;(b)频域模型
1)RC积分滤波器 • 这是最简单的低通滤波器,电路如图7―15(a)所示,其传递函数为 2) 无源比例积分滤波器 • 无源比例积分滤波器如图7―16(a)所示。与RC积分滤波器相比,它附加了一个与电容C串联的电阻R2,这样就增加了一个可调参数。它的传递函数为 (7―15) (7―16)
图7―15 RC积分滤波器的组成与频率特性 (a)组成;(b)频率特性
图7―16 无源比例积分滤波器 (a)组成; (b)频率特性
3) 有源比例积分滤波器 • 有源比例积分滤波器由运算放大器组成,电路如图7-17(a)所示。当运算放大器开环电压增益A为有限值时,它的传递函数为 (7―17) 式中,τ1’=(R1+AR1+R2)C;τ2=R2C。若A很高,则 (7―18)
图7―17 有源比例积分滤波器 (a)电路; (b)频率特性
3. 压控振荡器 • 压控振荡器(VCO)是一个电压-频率变换器,在环路中作为被控振荡器,它的振荡频率应随输入控制电压uc(t)线性地变化,即 式中,ωv(t)是VCO的瞬时角频率,kd是线性特性斜率,表示单位控制电压可使VCO角频率变化的数值。因此又称为VCO的控制灵敏度或增益系数,单位为[rad/V·s]。在锁相环路中,VCO的输出对鉴相器起作用的不是瞬时角频率而是它的瞬时相位,即 (7―19)
(7―20) 将此式与式(7―11)比较,可知以ω0t为参考的输出瞬时相位为 (7―21)
由此可见,VCO在锁相环中起了一次积分作用,因此也称它为环路中的固有积分环节。式(7―21)就是压控振荡器相位控制特性的数学模型,若对式(7―21)进行拉氏变换,可得到在复频域的表示式为由此可见,VCO在锁相环中起了一次积分作用,因此也称它为环路中的固有积分环节。式(7―21)就是压控振荡器相位控制特性的数学模型,若对式(7―21)进行拉氏变换,可得到在复频域的表示式为 • VCO的传递函数为 (7―22) (7―23)
4. 环路相位模型和基本方程 • 复时域分析时可用一个传输算子F(p)来表示,其中p(≡d/dt)是微分算子。由图7―19,我们可以得出锁相环路的基本方程 (7―24) (7―25)
将式(7―25)代入式(7―24)得 (7―26) • 设环路输入一个频率ωr和相位θr均为常数的信号,即 式中,ω0是控制电压uc(t)=0时VCO的固有振荡频率;θr是参考输入信号的初相位。令 则 (7―27)
将式(7―27)代入式(7―26)可得固定频率输入时的环路基本方程:将式(7―27)代入式(7―26)可得固定频率输入时的环路基本方程: (7―28) 右边第二项是闭环后VCO受控制电压uc(t)作用引起振荡频率ωv相对于固有振荡频率ω0的频差(ωv-ω0),称为控制频差。由式(7―28)可见,在闭环之后的任何时刻存在如下关系: 瞬时频差=固有频差-控制频差 (7―29)
7.3.3 锁相环工作过程的定性分析 1.锁定状态 • 当在环路的作用下,调整控制频差等于固有频差时,瞬时相差θe(t)趋向于一个固定值,并一直保持下去,即满足 • 此时可以认为锁相环路进入锁定状态。环路对输入固定频率的信号锁定后,输入到鉴相器的两信号之间无频差,只有一固定的稳态相差θe(t)。此时的误差电压Udsinθe(∞)为直流,它经过F(j0)的过滤作用之后得到控制电压UdF(j0)sinθe(∞)也是直流。 • 锁定时的环路方程为 (7―30) (7―31)
(7―32) • 从中解得稳态相差 • 锁定正是在由稳态相差θe(∞)产生的直流控制电压作用下,强制使VCO的振荡角频率ωv相对于ω0偏移了Δω0而与参考角频率ωr相等的结果。即 (7―33)
2. 跟踪过程 • 跟踪是在锁定的前提下,输入的参考频率和相位在一定的范围内,以一定的速率发生变化时,输出信号的频率和相位以同样的规律跟随变化,这一过程称为环路的跟踪过程。如ωr Δω0 θe(∞)Uc (∞) Δωv 。 • 当Δωv大得足以补偿固有频差Δω0时,环路维持锁定,因而有 则 • 如果继续增大Δω0,使|Δω0|>K0UdF(j0),则环路失锁(ωv≠ωr)。因此,我们把环路能够继续维持锁定状态的最大固有频差定义为环路的同步带: (7―34)
3.失锁状态 • 失锁状态就是瞬时频差(ωr-ωv)总不为零的状态。这时,鉴相器输出电压ud(t)为一上下不对称的稳定差拍波,其平均分量为一恒定的直流。正是这样的的直流电压通过环路滤波器的作用使VCO的平均频率ωv偏离ω0向ωr靠拢,这就是环路的频率牵引效应。
4. 捕获过程 • 开机时,鉴相器输入端两信号之间存在着起始频差(即固有频差)Δω0= ωr-ωv,其相位差Δω0t。因此,鉴相器输出的是一个角频率等于频差Δω0的差拍信号,即 • 若Δω0很大,ud(t)差拍信号的拍频很高,易受环路滤波器抑制,这样加到VCO输入端的控制电压uc(t)很小,控制频差建立不起来,ud(t)仍是一个上下接近对称的稳定差拍波,环路不能入锁。 • 当Δω0减小到某一范围时,鉴相器输出的误差电压ud(t)是上下不对称的差拍波,其平均分量(即直流分量)不为零。 (7―35)
通过环路滤波器的作用,使控制电压中的直流分量增加,从而牵引着VCO的频率ωv平均地向ωr靠拢。这使得ud(t)的拍频减小,增大差拍波的不对称性,即增大直流分量,这又将VCO的频率ωv进一步接近ωr。经过一段时间后,当平均频差减小到某一频率范围时,频率捕获过程结束。通过环路滤波器的作用,使控制电压中的直流分量增加,从而牵引着VCO的频率ωv平均地向ωr靠拢。这使得ud(t)的拍频减小,增大差拍波的不对称性,即增大直流分量,这又将VCO的频率ωv进一步接近ωr。经过一段时间后,当平均频差减小到某一频率范围时,频率捕获过程结束。 • 此后进入相位捕获过程, θe(t)最终趋于稳态值θe(∞),同时ud(t)、uc (t)也分别趋于它们的稳态值Udsin θe(∞) 、Uc (∞) ,压控振荡器的输出频率被锁定在参考信号频率ωr上,使 ( ωv = ωr),捕获全过程即告结束,环路锁定。
环路能否发生捕获是与固有频差的Δω0大小有关。只有当|Δω0|小到某一频率范围时,环路才能捕获入锁,这一范围称为环路的捕获带Δωp。它定义为在失锁状态下能使环路经频率牵引,最终锁定的最大固有频差|Δω0|max,即环路能否发生捕获是与固有频差的Δω0大小有关。只有当|Δω0|小到某一频率范围时,环路才能捕获入锁,这一范围称为环路的捕获带Δωp。它定义为在失锁状态下能使环路经频率牵引,最终锁定的最大固有频差|Δω0|max,即 (7―36)
7.3.4 锁相环路的应用 由以上的讨论已知,锁相环路具有以下几个重要特性: • 环路锁定后,没有剩余频差。压控振荡器的输出频率严格等于输入信号的频率。 • 跟踪特性。环路锁定后,当输入信号频率ωr稍有变化时,VCO的频率立即发生相应的变化,最终使VCO输出频率ωv=ωr。 • 滤波特性。锁相环通过环路滤波器的作用,具有窄带滤波特性,能够将混进输入信号中的噪声和杂散干扰滤除。 • 易于集成化。组成环路的基本部件都易于采用模拟集成电路。环路实现数字化后,更易于采用数字集成电路。
下面介绍锁相环的几种应用。 1.锁相调频与解调 • 用锁相环调频,能够得到中心频率高度稳定的调频信号,图7―21是这种方法的方框图。 图7―21 锁相环路调频器方框图
实现调制的条件:调制信号的频谱要处于低通滤波器通频带之外,并且调频指数不能太大。实现调制的条件:调制信号的频谱要处于低通滤波器通频带之外,并且调频指数不能太大。 • 利用满足上述调制条件的调制信号去线性控制VCO输出信号的瞬时频率,同时其中心频率通过窄带PLL精确锁定于晶振的频率,而不受调制信号的影响,从而在VCO的输出端可以得到中心频率高度稳定的调频信号。
调制跟踪锁相环本身就是一个调频解调器。将环路滤波器带宽设计成调制信号带宽,它利用锁相环路良好的调制跟踪特性,使锁相环路跟踪输入调频信号瞬时相位的变化,即跟踪FM信号中反映调制规律变化的瞬时频偏,从而使VCO控制端获得解调输出。锁相环鉴频器的组成如图7―22所示。调制跟踪锁相环本身就是一个调频解调器。将环路滤波器带宽设计成调制信号带宽,它利用锁相环路良好的调制跟踪特性,使锁相环路跟踪输入调频信号瞬时相位的变化,即跟踪FM信号中反映调制规律变化的瞬时频偏,从而使VCO控制端获得解调输出。锁相环鉴频器的组成如图7―22所示。 图7―22 锁相鉴频器
