Download
1 / 13
130 likes | 306 Views
Cruise control system. - 9/3~4 일 강의내용. 아무개 아무개 아무개 아무개 아무개 아무개 아무개 아무개. Cruise control system. 기준속도 65 Km/h Throttle 이 1 도 변하면 10 Km/h 의 속도가 변함 Grade( 노면 경사도 ) 가 1% 변화에 속도가 5 Km/h 감소 Speedometer( 속도계 ) : 1Km/h 의 수분의 일까지 정확히 측정가능 Open-loop vs. Closed-loop.

E N D
Cruise control system - 9/3~4일 강의내용 아무개 아무개 아무개 아무개 아무개 아무개 아무개 아무개
Cruise control system • 기준속도 65 Km/h • Throttle이 1도 변하면 10 Km/h의속도가 변함 • Grade(노면 경사도)가 1% 변화에 속도가 5 Km/h 감소 • Speedometer(속도계) : 1Km/h의 수분의 일까지 정확히 측정가능 • Open-loop vs. Closed-loop
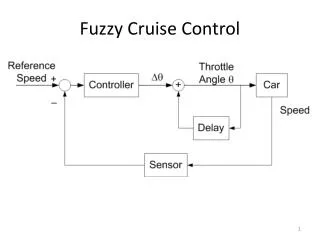
Open-loop vs. Closed-loop • K값이 커지면 외란에 영향을 덜 받는다. • K값이 너무 커지면 Gain이 커져 시스템이 불안정해진다. • Modeling errors 시 외란의 영향을 받지 않고 reference도 정확해진다
FVT – Final Value Theorem (전제조건 : Y(s) pole L.H.P) ℒ