Download
1 / 4
40 likes | 186 Views
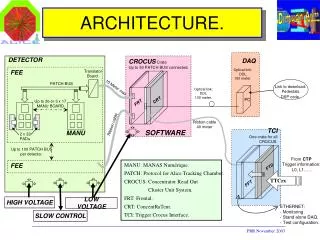
IGVC Architecture. 2010’s Entry WAVE. Vision (Lane Detection). Vision (Obstacles). Proximity Sensor. IMU. Encoders. GPS. E-Stop. Map. Kalman Filter. Sense. Navigation (autonomous, teleoperation ). Plan. Drive Control. Status Indicators (LEDs, buzzer?). Act. Drive (Motors).

E N D
IGVC Architecture 2010’s Entry WAVE
Vision (Lane Detection) Vision (Obstacles) Proximity Sensor IMU Encoders GPS E-Stop Map Kalman Filter Sense Navigation (autonomous, teleoperation) Plan Drive Control Status Indicators (LEDs, buzzer?) Act Drive (Motors)
Path Planning • Obstacle Course • Lanes • Switchbacks • Navigation Challenge • Shortest path between waypoints
Kalman Filter (Localization) • How can we best determine our current location from on-board sensors?