Download
1 / 38
380 likes | 393 Views
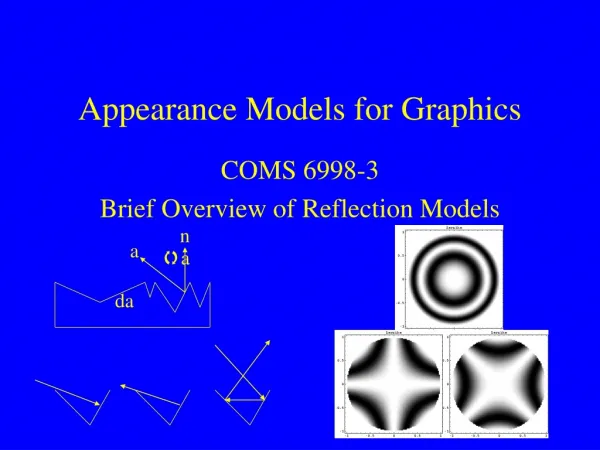
Mathematics for Graphics. Objectives. Introduce the elements of geometry Scalars Vectors Points Develop mathematical operations among them in a coordinate-free manner Define basic primitives Line segments Polygons. 3D Cartesian co-ordinates. Basic Elements.

E N D
Objectives • Introduce the elements of geometry • Scalars • Vectors • Points • Develop mathematical operations among them in a coordinate-free manner • Define basic primitives • Line segments • Polygons
Basic Elements • Geometry is the study of the relationships among objects in an n-dimensional space • In computer graphics, we are interested in objects that exist in three dimensions • Want a minimum set of primitives from which we can build more sophisticated objects • We will need three basic elements • Scalars • Vectors • Points
Scalars • Need three basic elements in geometry • Scalars, Vectors, Points • Scalars can be defined as members of sets which can be combined by two operations (addition and multiplication) obeying some fundamental axioms (associativity, commutivity, inverses) • Examples include the real and complex number systems under the ordinary rules with which we are familiar • Scalars alone have no geometric properties
Vectors And Point • We commonly use vectors to represent: • Points in space (i.e., location) • Displacements from point to point • Direction (i.e., orientation) • But we want points and directions to behave differently • Ex: To translatesomething means to move it without changing its orientation • Translation of a point = different point • Translation of a direction = same direction
Vectors • Physical definition: a vector is a quantity with two attributes • Direction • Magnitude • Examples include • Force • Velocity • Directed line segments • Most important example for graphics • Can map to other types v
Y v X 2 2 Z 2 A vector in 3D Vector • A quantity characterized by a magnitude and direction • Can be represented by an arrow, where magnitude is the length of the arrow and the direction is given by slope of the line v = OP = จุดปลาย – จุดต้น = P-O Y P (2, 1) 1 v X 2 O (0, 0) A vector in 2D
Vector Operations • Every vector has an inverse • Same magnitude but points in opposite direction • Every vector can be multiplied by a scalar • There is a zero vector • Zero magnitude, undefined orientation • The sum of any two vectors is a vector • Use head-to-tail axiom w v v v -v u
Vectors Lack Position • These vectors are identical • Same direction and magnitude • Vectors spaces insufficient for geometry • Need points
Vector Addition • Addition of vectors follows the parallelogram law in 2D and the parallelepiped law in higher dimensions:
1.5v v Vector Multiplication by a Scalar • Multiplication by a scalar scales the vectors length appropriately (but does not affect direction):
Subtraction -v u v -v Inverse vector? Can be seen as an addition of u + (-1v) -v u
3 5 4 P2 Vector Magnitude v P1 • The magnitude or “norm” of a vector of dimension 3 is given by the standard Euclidean distance metric: • How about dimension n? 2D example 3D example 2
v Unit Vectors • Vectors of length 1 are often termed unit vectors (a.k.a. normalised vectors). • When we only wish to describe direction we use normalised vectors – often to avoid redundancy • For this and other reasons, we often need to normalise a vector: • e.g.
Examples • Suppose point P1(-1,-3) and P2(2,-7). Find • Vector v obtained from these two points • Norm of vector v • Unit vector
Dot Product • Dot product (inner product) is defined as: • Note: • Therefore we can redefine magnitude in terms of the dot-product operator: • The dot product operator is commutative and associative.
q u v Dot Product • The Dot Product can also be obtained from the following equation: where q is the angle between the two vectors • So, if we know the vectors u and v, then thedot product is useful for finding the angle between two vectors. • Note that if we had already normalised the vectors u and v then it would simply be:
Dot Product Examples • Find the angle between vectors { 1, 1, 0} and {0, 1, 0}?
Additional Properties • For any three vectors u, v, w and scalars a, b • uv = vu • u(v+w) = uv + uw • (u+v)w = uw + vw • If uv = 0 then u and v are orthogonal or perpendicular, where u and v are not zero vector
Cross Product • Used for defining orientation and constructing co-ordinate axes. • Cross product defined as: • The result is a vector, perpendicular to the plane defined by u and v: • Magnitude :
Cross Product Right Handed Coordinate System
Cross Product • Cross product is anti-commutative: • It is not associative: • Direction of resulting vector defined by operand order: R.H.S.
Cross Product • Consider, two vectors u = , v = , the cross product u x v
Vector Spaces • A linear combination of vectors results in a new vector: v= a1v1 + a2v2 + … + anvn wherea is any scalar • If the only set of scalars such that a1v1 + a2v2 + … + anvn = 0 is a1 = a2 = … = a3 = 0 then we say the vectors are linearly independent • The dimension of a space is the greatest number of linearly independent vectors possible in a vector set • For a vector space of dimension n, any set of n linearly independent vectors form a basis
Coordinate Systems v2 • 3D vector space • scalar component : 1, 2, 3 • basis vector : v1, v2, v3 • define a coordinate system • the origin : fixed reference point • column matrix origin v1 v3 Coordinate System
Points • Location in space • Operations allowed between points and vectors • Point-point subtraction yields a vector • Equivalent to point-vector addition v = P - Q P = v + Q
Affine Spaces • Point + a vector space • Operations • Vector-vector addition • Scalar-vector multiplication • Point-vector addition • Scalar-scalar operations • For any point define • 1 • P = P • 0 • P = 0 (zero vector)
Lines (in Affine Space) • Consider all points of the form • P(a)=P0 + a d • Set of all points that pass through P0 in the direction of the vector d • Affine addition
Parametric Form • This form is known as the parametric form of the line • More robust and general than other forms • Extends to curves and surfaces • Two-dimensional forms • Explicit: y = mx +h • Implicit: ax + by +c =0 • Parametric: x(a) = ax0 + (1-a)x1 y(a) = ay0 + (1-a)y1
Rays and Line Segments • If a >= 0, then P(a) is the ray leaving P0 in the direction d • If we use two points to define v, then P( a) = Q+av = Q + a (R-Q) = aR + (1-a)Q • For 0<=a<=1 we get all the points on the line segment joining R and Q
Convexity • An object is convex iff for any two points in the object all points on the line segment between these points are also in the object P P Q Q not convex convex = concave
Affine Sums • Consider the “sum” P=a1P1+a2P2+…..+anPn Can show by induction that this sum makes sense iff a1+a2+…..an=1 in which case we have the affine sum of the points P1,P2,…..Pn • If, in addition, ai>=0, we have the convex hull of P1,P2,…..Pn
Convex Hull • Smallest convex object containing P1,P2,…..Pn • Formed by “shrink wrapping” points
Curves and Surfaces • Curves are one parameter entities of the form P(a) where the function is nonlinear • Surfaces are formed from two-parameter functions P(a, b) • Linear functions give planes and polygons P(a) P(a, b)
Planes • A plane be determined by a point and two vectors or by three points P R P(a,b)=R+a(Q-R)+b(P-Q) P(a,b)=R+au+bv
Triangles convex sum of P and Q convex sum of S(a) and R for 0<=a,b<=1, we get all points in triangle
Planes R • Extension of line P Q n v P normal to the plane P0 u