Download
1 / 13
130 likes | 228 Views
PMT Survey Summary. Enrique Calvo Alamillo Chooz 10 February 2010. Index: Naming system of the table and description. Position difference of the PMT center. Position difference of the center of 4 photo targets on PMTs. Angle differences of the PMTs. Conclusion. Backup.

E N D
PMT Survey Summary Enrique CalvoAlamillo Chooz 10 February 2010
Index: Naming system of the table and description. Position difference of the PMT center. Position difference of the center of 4 photo targets on PMTs. Angle differences of the PMTs. Conclusion. Backup.
1.- Naming system of the table and description. DocDB ref. 1337-v1 PMT Naming system followed: • Software's coordinates: Naming starting from 0 to 389 from the upper pmt to the lower. This mean from Rings 1,...4 on the LID, Rings 10,...1 on the WALL and finally Rings 4,...1 on the BASE. Sense in each ring from X to Y. • Installation's and ESIC's labeling are explained in their documents.
2.- Position difference of the PMT center. RMS PMTCenter error: Δ(x'-X'e) = 10,304 mm; Δ(y'-Y'e) =9,404 mm; Δ(z'-Z'e) =12,882 mm; Δ|p'-P'e| =18,988 mm.
3.-Position difference of the center of 4 photo targets on PMTs. RMS Center4target error: Δ(x''-X''e) = 11,083 mm; Δ(y''-Y''e) =10,391 mm; Δ(z''-Z''e) =10,974 mm; Δ|p''-P''e| =18,742 mm.
4.-Angle differences of the PMTs. RMS Δ angle error: Δ(a- ae) PMT angle on XY error = 1,424º Δ(b- be) PMT angle on YZ error= 4,530º Δ(c- ce) PMT angle on ZX error= 5,278º
5.- Conclusions • The worst cases find on the overall PMTs are between 35-40 mm difference from the theoretical position. • This difference can be caused from different composition errors, that a priori, can’t be discriminates from the survey data: • Us supports base ( <5 mm). • Assembly PMT (1-3 mm). • Circular and vertical rails (< 8 mm) • BASE-LID: Positioning and Welding process of the base pieces to support the circular rails (during the installation process of the base was observer radial differences from -5 mm to 9 mm and few points +20 mm) • WALL: welding process on the different sectors of the cylinder on Z direction, circumferential differences on the 3 sectors and also contribution during the drill support hole process for the vertical rails (during de installation was observed differences of several centimeters on de circumference . And about 10-12 mm on Z). • Mean values of the PMTs positioning have differences of about 20 mm.
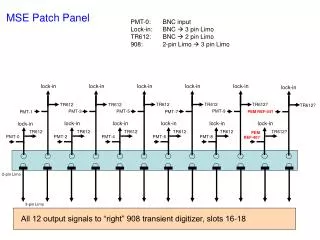
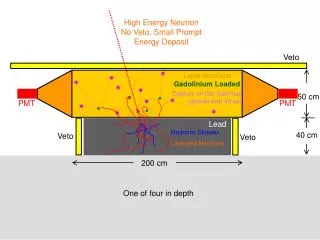
Z x Theoretical PMT Buffer WALL-BASE-LID distribution • 3 different vertical rails step installation on the wall with 10 angular PMT orientations on RZ plane and 30 on XY plane. • 4 different radial step distributions, on BASE and LID, with 4 angular orientation on RZ and with 60 different orientations on XY plane.