Download
1 / 33
330 likes | 335 Views
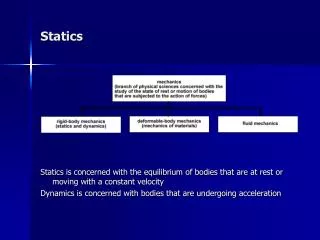
This lecture covers the basics of coplanar forces in statics, including the laws of cosines and sines. Topics include vector addition, scalar multiplication, shear and normal forces, resultant forces, internal and external forces, and transmissibility.

E N D
Announcements • ME221 TA’s and Help Sessions • Chad Stimson – stimson1@msu.edu • Homework grading & help room • Tuesdays & Thursdays – 8am to 1pm – 1522EB • Jimmy Issa – jimmy@msu.edu • Quiz & exam grading & help room • Tuesdays & Thursdays – 1pm to 5pm – 2415EB Lecture 2
Announcements • HW#1 Due on Friday, May 21 • Chapter 1 - 1.1, 1.3, 1.4, 1.6, 1.7 • Chapter 2 – 2.1, 2.2, 2.11, 2.15, 2.21 • Quiz #1 on Friday, May 21 Lecture 2
Last Lecture • Chapter 1: Basics • Vectors, vectors, vectors • Law of Cosines • Law of Sines • Drawing vector diagrams • Example 1: Addition of Vectors Lecture 2
g b a b a c Law of Cosines This will be used often in balancing forces Lecture 2
g b a b a c Law of Sines Again, start with the same triangle Lecture 2
Example Note: resultant of two forces is the vectorial sum of the two vectors 25o 45o 300 lb 200 lb Lecture 2
200 lb 25o 110o R 300 lb 155o 200 lb = 90o+25o-a a 25o R 45o 300 lb Lecture 2
Line of action stays the same Line of action 0.5 x A A Scalar Multiplication of Vectors Multiplication of a vector by a scalar simply scales the magnitude with the direction unchanged Lecture 2
Forces • Review definition • Shear and normal forces • Resultant of coplanar forces Lecture 2
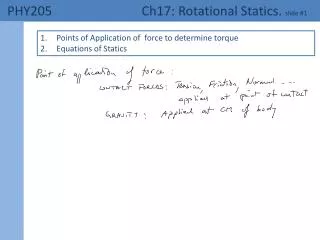
Characteristics of a Force • Its magnitude • denoted by |F| • Its direction • Its point of application • important when we discuss moments later Lecture 2
P P Cut plane through body P Internal tension Further Categorizing Forces • Internal or external • external forces applied outside body • A section of the body exposes internal body Lecture 2
P Intenal shear forces P Shear and Oblique • Shear internal force has line of action contained in cutting plane Lecture 2
N P S Oblique Internal Forces • Oblique cutting planes have both normal and shear components Where N + S = P Lecture 2
B A Transmissibility • A force can be replaced by a force of equal magnitude provided it has the same line of action and does not disturb equilibrium Lecture 2
Weight is a Force • Weight is the force due to gravity • W = mg • where m is mass and g is gravity constant • g = 32.2 ft/s2 = 9.81 m/s2 • English and metric • Weight lb or N • Mass slugs or kg Lecture 2
Resultant of Coplanar Forces A body’s motion depends on the resultant of all the forces acting on it In 2-D, we can use the Laws of Sines and Cosines to determine the resultant force vector In 3-D, this is not practical and vector components must be utilized • more on this later Lecture 2
y A qy qy Ay qx Ax x Perpendicular Vectors y Ax A Ay Ay qx Ax x Ax is the component of vector A in the x-direction Ay is the component of vector A in the y-direction Lecture 2
y y Ay A qy qx Ax Ax Ay A= x x Vector Components Vector components are a powerful way to represent vectors in terms of coordinates. where Ax = |A| cos qx Ay = |A| cos qy = |A| sin qx Lecture 2
Vector Components (continued) Ax = |A| cos qx cos qx = Ax / |A| = x = y Ay = |A| cos qy cos qy = Ay / |A| = |A| sin qx x and y are called direction cosines x2 +y2 = 1 Note: To apply this rule the two axes must be orthogonal Lecture 2
Summary • External forces give rise to • tension and compression internal forces • normal and shear internal forces • Forces can translate along their line of action without disturbing equilibrium • The resultant force on a particle is the vector sum of the individual applied forces Lecture 2
3-D Vectors; Base Vectors • Rectangular Cartesian coordinates (3-D) • Unit base vectors (2-D and 3-D) • Arbitrary unit vectors • Vector component manipulation Lecture 2
y O x z 3-D Rectangular Coordinates • Coordinate axes are defined by Oxyz Coordinates can be rotated any way we like, but ... • Coordinate axes must be a right-handed coordinate system. Lecture 2
y y A Ay Az O O Ax x x z z A = Ax + Ay + Az Writing 3-D Components • Component vectors add to give the vector: = Also, Lecture 2
y qy A O qx x z qz 3-D Direction Cosines The angle between the vector and coordinate axis measured in the plane of the two Where: lx2+ly2+lz2=1 Lecture 2
y O x z Unit Base Vectors Associate with each coordinate, x, y, and z, a unit vector (“hat”). All component calculations use the unit base vectors as grouping vectors. Now write vector as follows: where Ax = |Ax| Ay = |Ay| Az = |Az| Lecture 2
Vector Equality in Components • Two vectors are equal if they have equal components when referred to the same reference frame. That is: if Ax = Bx , Ay = By , Az = Bz Lecture 2
Additional Vector Operations • To add vectors, simply group base vectors • A scalar times vector A simply scales all the components Lecture 2
y b O x z General Unit Vectors • Any vector divided by its magnitude forms a unit vector in the direction of the vector. • Again we use “hats” to designate unit vector Lecture 2
y rA O x z rB/A rB Position Vectors in Space • Points A and B in space are referred to in terms of their position vectors. A • Relative position defined by the difference B Lecture 2
Vectors in Matrix Form • When using MatLab or setting up a system of equations, we will write vectors in a matrix form: Lecture 2
Summary • Write vector components in terms of base vectors • Know how to generate a 3-D unit vector from any given vector Lecture 2
Example Problem Lecture 2