Download
1 / 1
10 likes | 183 Views
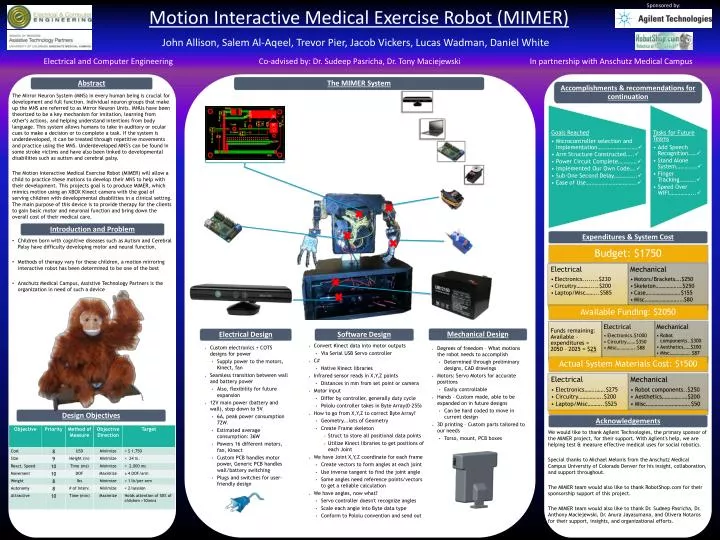
The MIMER System. Sponsored by:. We would like to thank Agilent Technologies, the primary sponsor of the MIMER project, for their support. With Agilent's help, we are helping test & measure effective medical uses for social robotics.

E N D
The MIMER System Sponsored by: We would like to thank Agilent Technologies, the primary sponsor of the MIMER project, for their support. With Agilent's help, we are helping test & measure effective medical uses for social robotics. Special thanks to Michael Melonis from the Anschutz Medical Campus University of Colorado Denver for his insight, collaboration, and support throughout. The MIMER team would also like to thank RobotShop.com for their sponsorship support of this project. The MIMER team would also like to thank Dr. SudeepPasricha, Dr. Anthony Maciejewski, Dr. AnuraJayasumana, and OliveraNotaros for their support, insights, and organizational efforts. Children born with cognitive diseases such as Autism and Cerebral Palsy have difficulty developing motor and neural function. Methods of therapy vary for these children, a motion mirroring interactive robot has been determined to be one of the best Anschutz Medical Campus, Assistive Technology Partners is the organization in need of such a device John Allison, Salem Al-Aqeel, Trevor Pier, Jacob Vickers, Lucas Wadman, Daniel White Electrical and Computer Engineering Co-advised by: Dr. SudeepPasricha, Dr. Tony Maciejewski In partnership with Anschutz Medical Campus Motion Interactive Medical Exercise Robot (MIMER) Convert Kinect data into motor outputs • Via Serial USB Servo controller C# • Native Kinect libraries Infrared sensor reads in X,Y,Z points • Distances in mm from set point or camera Motor input • Differ by controller, generally duty cycle • Pololu controller takes in Byte Array(0-255) How to go from X,Y,Z to correct Byte Array? • Geometry...lots of Geometry • Create Frame skeleton • Struct to store all positional data points • Utilize Kinect libraries to get positions of each Joint We have Joint X,Y,Z coordinate for each frame • Create vectors to form angles at each joint • Use inverse tangent to find the joint angle • Some angles need reference points/vectors to get a reliable calculation We have angles, now what? • Servo controller doesn't recognize angles • Scale each angle into Byte data type • Conform to Pololu convention and send out The Mirror Neuron System (MNS) in every human being is crucial for development and full function. Individual neuron groups that make up the MNS are referred to as Mirror Neuron Units. MNUs have been theorized to be a key mechanism for imitation, learning from other’s actions, and helping understand intentions from body language. This system allows humans to take in auditory or ocular cues to make a decision or to complete a task. If the system is underdeveloped, it can be treated through repetitive movements and practice using the MNS. Underdeveloped MNS's can be found in some stroke victims and have also been linked to developmental disabilities such as autism and cerebral palsy. The Motion Interactive Medical Exercise Robot (MIMER) will allow a child to practice these motions to develop their MNS to help with their development. This projects goal is to produce MIMER, which mimics motion using an XBOX Kinect camera with the goal of serving children with developmental disabilities in a clinical setting. The main purpose of this device is to provide therapy for the clients to gain basic motor and neuronal function and bring down the overall cost of their medical care. Custom electronics + COTS designs for power • Supply power to the motors, Kinect, fan Seamless transition between wall and battery power • Also, flexibility for future expansion 12V main power (battery and wall), step down to 5V • 6A, peak power consumption 72W. • Estimated average consumption: 36W • Powers 16 different motors, fan, Kinect • Custom PCB handles motor power, Generic PCB handles wall/battery switching • Plugs and switches for user-friendly design Degrees of freedom – What motions the robot needs to accomplish • Determined through preliminary designs, CAD drawings Motors: Servo Motors for accurate positions • Easily controllable Hands – Custom made, able to be expanded on in future designs • Can be hard coded to move in current design 3D printing – Custom parts tailored to our needs • Torso, mount, PCB boxes