Download
1 / 1
20 likes | 157 Views
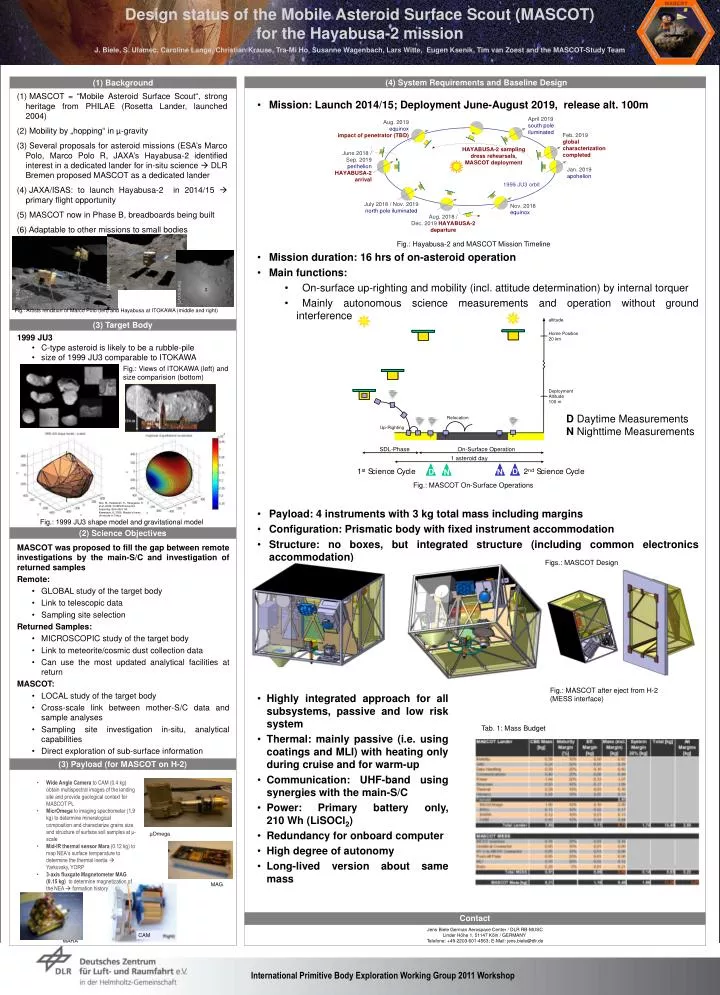
Design status of the Mobile Asteroid Surface Scout (MASCOT) for the Hayabusa-2 mission J. Biele, S. Ulamec, Caroline Lange, Christian Krause, Tra-Mi Ho, Susanne Wagenbach, Lars Witte, Eugen Ksenik, Tim van Zoest and the MASCOT-Study Team. (4) System Requirements and Baseline Design.

E N D
Design status of the Mobile Asteroid Surface Scout (MASCOT) for the Hayabusa-2 mission J. Biele, S. Ulamec, Caroline Lange, Christian Krause, Tra-Mi Ho, Susanne Wagenbach, Lars Witte, Eugen Ksenik, Tim van Zoest and the MASCOT-Study Team (4) System Requirements and Baseline Design (1) Background • MASCOT = “Mobile Asteroid Surface Scout“, strong heritage from PHILAE (Rosetta Lander, launched 2004) • Mobility by „hopping“ in µ-gravity • Several proposals for asteroid missions (ESA’s Marco Polo, Marco Polo R, JAXA’s Hayabusa-2 identified interest in a dedicated lander for in-situ science DLR Bremen proposed MASCOT as a dedicated lander • JAXA/ISAS: to launch Hayabusa-2 in 2014/15 primary flight opportunity • MASCOT now in Phase B, breadboards being built • Adaptable to other missions to small bodies • Mission: Launch 2014/15; Deployment June-August 2019, release alt. 100m • Mission duration: 16 hrs of on-asteroid operation • Main functions: • On-surface up-righting and mobility (incl. attitude determination) by internal torquer • Mainly autonomous science measurements and operation without ground interference • Payload: 4 instruments with 3 kg total mass including margins • Configuration: Prismatic body with fixed instrument accommodation • Structure: no boxes, but integrated structure (including common electronics accommodation) Fig.: Hayabusa-2 and MASCOT Mission Timeline [JAXA/ISAS] [ESA]] [JAXA/ISAS] Fig.: Artists rendition of Marco Polo (left) and Hayabusa at ITOKAWA (middle and right) (3) Target Body • 1999 JU3 • C-type asteroid is likely to be a rubble-pile • size of 1999 JU3 comparable to ITOKAWA Fig.: Views of ITOKAWA (left) and size comparision (bottom) D Daytime Measurements N Nighttime Measurements Fig.: MASCOT On-Surface Operations Abe, M., Kawakami, K., Hasegawa, S. et al. 2008, COSPAR Scientific Assembly, B04-0061-08. Kawakami, K. 2009, Master's thesis, University of Tokyo Fig.: 1999 JU3 shape model and gravitational model (2) Science Objectives • MASCOT was proposed to fill the gap between remote investigations by the main-S/C and investigation of returned samples • Remote: • GLOBAL study of the target body • Link to telescopic data • Sampling site selection • Returned Samples: • MICROSCOPIC study of the target body • Link to meteorite/cosmic dust collection data • Can use the most updated analytical facilities at return • MASCOT: • LOCAL study of the target body • Cross-scale link between mother-S/C data and sample analyses • Sampling site investigation in-situ, analytical capabilities • Direct exploration of sub-surface information Figs.: MASCOT Design Fig.: MASCOT after eject from H-2 (MESS interface) • Highly integrated approach for all subsystems, passive and low risk system • Thermal: mainly passive (i.e. using coatings and MLI) with heating only during cruise and for warm-up • Communication: UHF-band using synergies with the main-S/C • Power: Primary battery only, 210 Wh (LiSOCl2) • Redundancy for onboard computer • High degree of autonomy • Long-lived version about same mass Tab. 1: Mass Budget (3) Payload (for MASCOT on H-2) • Wide Angle Camera to CAM (0.4 kg) obtain multispectral images of the landing site and provide geological context for MASCOT PL • MicrOmega to imaging spectrometer (1,9 kg) to determine mineralogical composition and characterize grains size and structure of surface soil samples at μ-scale • Mid-IR thermal sensor Mara (0.12 kg) to map NEA‘s surface temperature to determine the thermal inertia Yarkovsky, YORP • 3-axis fluxgate Magnetometer MAG (0.15 kg) to determine magnetization of the NEA formation history µOmega MAG Contact Jens Biele German Aerospace Center / DLR RB-MUSC Linder Höhe 1, 51147 Köln / GERMANY Telefone: +49-2203-601-4563; E-Mail: jens.biele@dlr.de CAM MARA International Primitive Body Exploration Working Group 2011 Workshop