Download
1 / 54
540 likes | 689 Views
第五章 视觉检测系统. 一、应用. 领域:工业、农业、 航天、军事等. 1 、工业检测. (1) 零件的识别与定位. ■ 自动连接引线、对准芯片和封装;. ■ 自动安装部件,自动焊接或自动切割加工、自动浇注系统等。. 例:双目立体视觉检测系统 —— 简单视觉的机器人系统. 芯片管脚检测. 芯片定位. 例:木料检测:缺陷、体积. 木料检测原理. (2) 零件尺寸的在线测量. 钢板厚度的在线测量. (3) 零件外观及内部缺陷检测. (4) 产品分类、分组. 苹果分级、分色、配色. (5) 产品标识、编码识别.

E N D
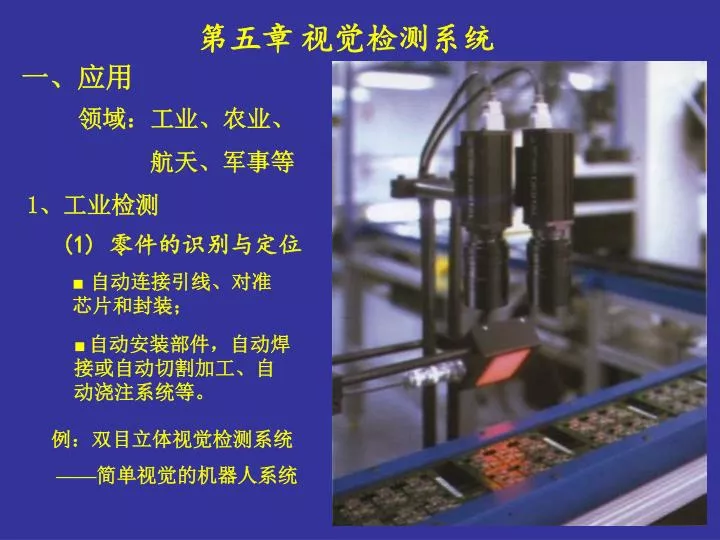
第五章 视觉检测系统 一、应用 领域:工业、农业、 航天、军事等 1、工业检测 (1) 零件的识别与定位 ■ 自动连接引线、对准芯片和封装; ■ 自动安装部件,自动焊接或自动切割加工、自动浇注系统等。 例:双目立体视觉检测系统 ——简单视觉的机器人系统
芯片管脚检测 芯片定位 例:木料检测:缺陷、体积 木料检测原理 (2) 零件尺寸的在线测量 钢板厚度的在线测量 (3) 零件外观及内部缺陷检测 (4) 产品分类、分组 苹果分级、分色、配色 (5) 产品标识、编码识别 商品条码、印鉴、标签
2、机器人导航 “手-眼”定位: 两个摄像机 --- 两幅平面图像 --- 三维场景信息 用于:目标识别、道路识别、障碍物判断、主动导航、自动视觉导航 无人驾驶汽车、无人驾驶飞机、无人战车、探测机器人 实例:美国Sojourner系列和Rocky系列火星探测移动机器人
“勇气”号火星车发回的彩色照片 “机遇”号火星车拍摄 火星土壤的显微照片 美国勇气号和机遇号火星探测移动机器人
CT图像 医学影像融合分析 细胞个数统计 3、生物医学图像分析 (1)医学临床诊断 : X射线、B超、CT、核磁共振(MRI) 自动检测:染色体切片、癌细胞切片、超声波图象
(2)生物图像分析:形状、组织切片、染色体配对、细菌、病毒、(2)生物图像分析:形状、组织切片、染色体配对、细菌、病毒、 病原体外形尺寸检测、颜色识别、表面损伤检测以及组织分析 例:水果分类;发芽土豆;杂草识别 叶片细胞显微放大图片 转基因大豆孢子
4、遥感图像分析: 卫星遥感图像 --- 气象卫星(红外成象 --- 云图 --- 气象状况) 资源卫星(多光谱成象 ---- 地质、矿藏、森林、灾害) 海洋卫星(合成孔径雷达成象 --- 海洋、海浪、海滩) 航空摄影图像 --- (多目成象 --- 大地测量、测绘) 5、监控、安防、交通管理: 交通 --- 车辆识别、牌照识别、车型判断、车辆监视、交通流量检测 安全 --- 指纹判别与匹配、面孔与眼底识别、安全检查(飞机、海关) 监视 --- 超市、商店防盗、银行监控,停车场、电梯闭路电视 6、军事与国防: 超低空雷达、超视距雷达、导弹制导、导弹导航、地形匹配、 单兵作战系统、战场遥测、夜视仪、声纳成象 7、办公与家电: 办公设备 --- 数码复印机、扫描仪、传真机、绘图仪 家用电器 --- 数码摄像机、数码照相机、可视电话、可视门铃
二、视觉系统的一般构成 电 电 光 光 光电元件 测量电路 y 光源 光通路 x1 x2 典型视觉系统 计算机 光源 场景 摄像机 图像卡 工作原理: 光 → 敏感元件 → 电 (光电元件) 传感器:
光源 输出 镜头 摄像机 电缆 场景 镜头 摄像机 图像存储体 计算机 镜头 摄像机 视觉系统流程图 控制 图像采集部分、图像处理部分、通信和I/O部分以及输出和执行机构 图像采集系统:可视化图像或特征数据 由光源、镜头、摄像机、图像采集卡等构成 单目视觉:一个摄像组件(镜头+摄像机) 多目视觉:多个摄像组件(镜头+摄像机) 图像质量好 图像处理简单、结果理想 图像质量差 图象处理麻烦、结果不理想
物体 1、眼睛的结构及成像 人类视觉 — 眼睛 计算机视觉 — 图像输入系统 晶状体 —镜头;视网膜 — 像敏面; 远物体 — 晶状体扁平 — 屈光能力小 — 距离大(最大17mm) 近物体 — 晶状体厚 — 屈光能力大 — 距离小(最小14mm)
2、电磁波谱 光谱 --- 紫外 → 可见光 → 红外 可见光谱
三、图像采集系统 1、光源 (1)光源的作用: ①使视场具有足够照度 ---- 整体亮度、突出特征量 ②满足一定的投影关系 ----位置变化、成像质量 ③满足一定的滤光要求 ---- 区别、对比度 选择:几何形状、照明亮度、均匀度、光谱特性,发光效率、使用寿命 (2)光源的种类: ① 自然光源 --- 天体(地球、太阳、星体)、大气
② 人工光源: • 按发光机理:荧光灯 、卤素灯 、气体放电灯、发光二极管(LED)、 • 激光二极管LD ① 白炽光源: 器件:白炽灯 --- 钨丝(熔点3600K) 特点: 谱线丰富(可见光+红外光) 应用: 滤色片 → 窄带频率光,避免杂光干扰 → 仪器 卤钨灯--- 改进的白炽灯(碘、溴) 特点 --- 亮度高、发光效率高、体积小、成本低 ② 气体放电光源: 原理:气体分子激发→放电 (电弧灯) 器件:碳弧灯、钠弧灯、氙弧灯、水银弧灯 特点:功率大,光色接近日光,紫外线丰富 应用:强光、色温要求接近日光
③发光二极管: 原理:半导体,电致发光 器件:LED,可见光、红外光 特点: 体积小、功耗低、寿命长、响应快、易于数字控制、比普通光源单色性好、亮度高 应用:电路(信号)、仪器面板(提示、报警、状态显示) ④激光光源: 原理: 外界光→光原子→能级跃迁→受激辐射→光放大→谐振→辐射激光 特点: 方向性好---发散角很小(约0.18º),比普通光小2~3数量级亮度高 --- 能量高度集中,亮度比普通光高几百万倍 单色性好---光谱范围极小,频率单一; (He-Ne激光:λ=632.8nm,Δλ=10-6nm) 相干性好---受激辐射,传播方向/振动方向/频率/相位一致 时间相干性、空间相干性均好 器件: 固体激光器---体积小,坚固,功率高 → 红宝石、(少用) 气体激光器---小巧、单色性好、能连续工作、功率小 → 氦氖、CO2 液体激光器---激光波长可连续调节(范围)→ 染科 半导体激光器--效率高、体积小、重量轻、结构简单、功率小、非线性
面光源 --- 专用 点光源 --- 发光二极管 线光源 其中LED光源凭借其诸多的优点在现代视觉系统中得到越来越多的应用。 LED光源的种类(形状): b. 按安装方式: 背向照明: 被测物在光源和摄像机之间 --- 对比度好 前向照明: 光源放在物体的后面 —— 便于安装 结构光照明: 光源有特定的方向,光束有精确的形状。 --- 光栅或线光源 畸变 三维形状 频闪光照明: 高频率的光脉冲 --- 高速运动物体
2、光学系统 组成: 成像物镜 + 光电器件 ① 照相摄影系统:
数字式测量投影仪 ④ 投影系统
当镜头成像平面不在摄像机像面上时,输出图像模糊不清当镜头成像平面不在摄像机像面上时,输出图像模糊不清 ---调整镜头的位置,改变CCD与镜头基准面的距离 改变光积分时间/曝光量--- 改变灰度(人眼所不具备的功能) a、摄影镜头 相当于人眼的晶状体 (1) 作用: ①成像: 没有镜头,摄像机不能采集到任何图像。—输出被噪声淹没 ②聚焦: ③ 曝光: ④变焦: 改变镜头的焦距 --- 改变成象大小 (人眼所不具备的功能)
(2)镜头的主要指标: ①焦距: 焦距的大小决定着视场角的大小。 焦距小(短),视场角大,观察范围大,但远处物体分辨不很清楚 焦距大(长),视场角小,观察范围小,很远的物体也能看清楚 选择焦距:观测范围 —是要观测细节,还是要较大的观测范围 近距离大场面 — 小焦距广角;远处细节 — 大长焦 焦距的计算: f = vD/V f =hD/H 选择比计算值小的固定焦距,则视角还会大一些 焦距大小:几毫米—数米
光通量与 F 值的平方成反比关系,F 值越小,光通量越大。 (光圈指数、光阑系数),表示光通量大小,用 F 表示,F 数 ②光圈: 以镜头焦距 f 和通光孔径 D 的比值来衡量:F = f /D (镜头标明) 光圈指数序列的标值:1.4,2,2.8,4,5.6,8,11,16,22等, 镜头上标注 --- 焦距、光圈 ——确定镜头 ③安装方式: --- 螺纹连接 摄影镜头 --- 螺距为1英寸32牙,直径为1英寸(英制) 方式--- C式和CS式两种,差别是镜头和CCD像面的距离不同, C式安装座从基准面到焦点的距离为17.562毫米, CS式安装座从基准面到焦点距离为12.5毫米。 专用接圈----C式镜头比CS式镜头多一个专用接圈的长度, 照相镜头 --- M42×1(直径为42mm,螺距为1mm) 单板式CCD镜头 --- M12×0.5(直径为12mm,螺距为0.5mm)
(3)镜头的种类: ①按焦距大小分类: 分为广角镜头、标准镜头、长焦距镜头 ②按变焦方式分类: 固定焦距镜头、手动变焦距镜头、电动变焦距镜头 固定焦距镜头---固定视场大小和距离, 手动变焦镜头---偶尔改变观察范围和目标大小 电动变焦镜头---经常性改变观察范围,变焦范围大, 既可以看大范围,也可以聚焦某个细节。 ③按光圈方式分类:固定光圈镜头、手动变光圈镜头、自动变光圈镜头 固定光圈镜头----固定场景和目标,亮度不变, 用于光线变化大且频繁的场合。 手动变光圈镜头---适合亮度变化不大的场合(光圈环) 一次性调整合适为止,不变 自动变光圈镜头---会随着光线的变化而自动调整, ④按变焦倍数:2 倍变焦、6 倍变焦、10 倍变焦、20 倍变焦等。 ⑤按安装方式分类:分为普通安装镜头、隐蔽安装镜头(针孔镜头) ⑥按用途分类:照相镜头、摄影镜头、单板式CCD镜头
b、光电器件 (1) 外光电效应及其器件 ①外光电效应 原理:光 → 物体表面 → 光电子发射 特点:速度快---从光照射到释放电子时间不超过10-9秒。 需足够光能---光子能力 > 表面溢出功 应用:足够的光强,高速---光电开关 ②光电管 原理:光 → 阴极 → 光电子 → 阳极 → 空间电子流→外接电阻 → 压降U=f(I) 特点:简单,灵敏度低 (充入惰性气体→气体轰击→自由电子)
导带 禁带 价带 半导体能带图 ③光电倍增管 原理:光 → 阴极 → 光电倍增极→ 阳极 → 电流 特点:光电流大,灵敏度高 倍增率=δn , δ-单极倍增率(3~6) n-倍增极数(4~14) ④应用:开关测量 → 光电开关 ,计数 (2) 内光电效应 ①原理: 光 → 半导体 → 电子吸收能量 → 跃迁 → 电子-空穴对 光电导效应: 原理:光 → 电子-空穴对 → 导电性 → 电阻 器件:光敏电阻、光敏二极管、光敏三极管 光生伏特效应: 原理: 光→PN结(无偏置)→ 电子→N, 空穴→P → 电动势 器件:光电池 (硅,锗)
动态特性 光谱特性 光照特性 ②光敏电阻: 原理:电阻器件,加直流偏压,无极性 无光照---电子-空穴对很少---电阻大(暗电阻) 有光照---电子-空穴对增多---导电性增强 特点:灵敏度高,体积小,重量轻,性能稳定 批量生产,价格便宜 特性:光照特性为非线性,光谱特性存在单峰,动态特性好 结构:金属封装---防潮 应用:工业自动化---开关元件,快速响应 家电---(感应式节能灯:判断照度)
光照特性 光谱特性 P N ③光敏二极管(光电二极管, PD: Photo-Diode) 原理: 半导体PN结- 无光时---高阻特性,微弱电流—暗电流,μA; 光照时---电子→N,空穴→P → 光电流 光照愈强 --- 光电流愈大 特性:光照特性-灵敏度和线性好,光谱特性-单峰性 应用:线性转换元件,开关元件, ④光敏三极管(光电三极管, PT: Photo-Triode) 原理:光敏二极管(bc结)+ 三极管 特点:灵敏度高于光敏二极管,
光谱特性 动态特性 特性:光照特性---灵敏度高于光敏二极管,线性好 光谱特性---单峰性 动态特性---响应速度低于光敏二极管 应用:线性转换元件,开关元件 ⑤高速光电二极管 PIN结光电二极管(PIN-PD) : I-高电阻率的本征半导体 响应速度快,灵敏度高,线性好, 用于光通讯,光测量 雪崩光电二极管: PN + P+ → APD 响应速度快,灵敏度高,线性差, 用于光通讯脉冲编码
⑥光电池 原理: 光→PN结→电子→N, 空穴→P → 电动势 光→电能→光电池(硅电池:单晶硅) 特点:有源器件,轻便、简单、无污染,动态特性好(硅) 工作于可见光波段---太阳能电池 连接方式:开路电压输出---(a) 短路电流输出---(b) 特性:光照特性---开路电压输出:非线性(电压---光强),灵敏度高 短路电流输出:线性好(电流---光强) ,灵敏度低 光谱特性---硅电池:0.5~1.2μm(红-红外),峰值0.8 μm(近红外) 锗电池:0.3~0.7μm(紫-红),峰值0.5 μm(绿) 应用:宇航飞行仪器,仪表电源,便携仪表(计算器) --- 开关测量(开路电压输出),线性检测(短路电流输出)
Ⅱ Ⅰ Ⅲ Ⅳ ⑦位置敏感器件(PSD-Positional Sensing Device) 原理:光 → 光电二极管 → 空穴由N向P移动 空穴→1端→I1空穴→2端→I2 比值: 应用:位置检测(一维、二维) ⑧四象限光电池 原理:集成4光电池 --- 四象限 光斑→4分量→I1 、I2 、I3 、I4; 比值: 应用:二维位置检测,准直 ⑨固态摄像器件:电荷耦合器件(Charge Coupled Device)--- CCD 说明:对于各种光电元件: (1)暗电流:无光照时输出电流 → 热噪声 (2)温度特性:温度 → 灵敏度、光谱特性 →降温、恒温、温度补偿 (3)器件材料: 硅 好于 锗
3、CCD摄像机 (1) CCD的种类: ①按成象器件分类:线阵CCD、面阵CCD 线阵CCD:一行,扫描;体积小,价格低; 面阵CCD:整幅图像;直观;价格高,体积大; ②按颜色分类:黑白摄像机、彩色摄像机 黑白摄像机:信息量小,时间、空间少 彩色摄像机:信息量大,时间、空间多 ③按扫描方式分类:逐行扫描、隔行扫描 逐行扫描:高速运动,避免边缘模糊 ④按输出信号分类:模拟式、数字式 数字摄像机 ---- 电子快门 曝光时间: 1/50s、1/125s、1/250s、1/500s、1/1000s、1/2000s、1/4000s、1/8000s、1/16000s、1/32000s… ⑤按形状分类:长形、短形、方块形、半球形、单板形
面阵CCD芯片 (2)摄像机的主要参数: ①制式: PAL制式 --- 标准为625行,50场,中国采用隔行扫描(黑白为CCIR) (西欧、亚洲、澳大利亚) 相位交替行(Phase Alternating Line)--- 逐行倒相 NTSC制式 --- 标准为525行,60场(黑白为EIA)(美加、日本) 国家电视委员会(National Television Systems Committee) 非标准制式 --- 只有医疗或其它专业领域才用到 ②CCD芯片尺寸 :
是CCD的主要性能指标,它决定了显示图像的清晰程度,是CCD的主要性能指标,它决定了显示图像的清晰程度, 分辨率越高,图像细节的表现越好。 ③CCD分辨率: 像素--- CCD每一个元素,像素越多,图像越清晰 44万(768*576)、100万(1024*1024) 200万(1600*1200)、600万(2832*2128) 电视线--- 简称线(TV LINES),彩色摄像头一般330~500线, 黑白可以达到600线。电视线与CCD和镜头有关, 还与摄像头电路通道的频带宽度直接相关,通 常规律是1MHz的频带宽度相当于清晰度为80线。 频带越宽,图像越清晰,线数值相对越大。 灰度级 --- 灰度分辨率、色彩分辨率, 1/2n 位数:8位(bit)、10位、11位、12位、 位数越多,图像越清晰。
天气 普通型 正常工作所需照度1~3LUX 照度LUX 室内场所 照度LUX 晴天 月光型 正常工作所需照度0.1LUX左右 30000~300000 生产车间 10~500 阴天 星光型 正常工作所需照度0.01LUX以下 3000 办公室 30~50 日出日落 红外型 采用红外灯照明,在没有光线的情况下也可以成像 300 餐厅 10~30 月圆 0.3~0.03 走廊 5~10 星光 0.0002~0.00002 停车场 1~5 阴暗夜晚 0.003~0.0007 ④最低照度 : 也称灵敏度,是CCD对环境光线的敏感程度(最暗光线)。 单位---勒克斯,LUX,数值越小,需要的光线越少,越灵敏。 根据照度划分,CCD又分为: 照度参考表:
典型值为46分贝, 如果为50分贝,则图像有少量噪声,但图像质量较好; 如果能达到60分贝,就不会出现噪声。 ⑤信噪比: ⑥光谱: 感光范围 —可见光、红外、超声波等 交流220伏、24伏;直流12伏和9伏。 ⑦电源: 选择摄像机:芯片尺寸、像素数、 线数、灵敏度、光谱响应
视觉传感器模块 4、图像存储体 (1)图像存储体的作用: ①接收来自摄像机的图像信号: 模拟摄像机 --- 标准电视信号 数字摄像机 --- 数字信号 ②存储图像数据:容量大、速度高、存取方便 ③图像处理:简单预处理 --- 滤波、二值化 图像叠加 --- 直线、圆、数字、符号 ④图像输出:输出到监视器 --- 监视、观察 输出到计算机 --- 图像处理、模式识别 (2)图像存储体的种类: ① 外置式:独立单元、单独供电、功能全面、容易构成视觉系统 视觉传感器 —光源、摄像头、图像处理器、控制与通讯接口 ② 图像卡式:插入计算机扩展槽内 --- 使用方便、速度快、成本低 ③ 传输式:数字摄像机 --- 计算机接口/网络传输 (串行、并行、USB)
电 电 图像 光 光电元件 信号处理 图像处理 四、信号处理系统 1.信号处理电路 1)信号放大 ---- 运算放大电路(运算放大器) 电压(mV/V);电流( A/mA) 2)噪声抑制 ---- 信号淹没在噪声中; 相敏检波:同步整流电路 模拟滤波:低通(LPF)、高通(HPF)、带通(BPF)、 带阻(BEF)、全通(APF)滤波器 3)电压/电流(V/A)转换 ---- 需要电流输出时; 4)模拟/数字(A/D)转换 ---- 需要输出数字信号时
2.图像处理技术 预处理+提取、识别、计算 成像 — 干扰等 — 图像降质 — 图像预处理 目的: 灰度校正---突出特征 --- 图像增强(锐化) 滤波降噪---去除噪声 --- 图像滤波(平滑化) 1) 图像增强 感兴趣特征 — 突出;不需要 — 衰减;不逼近 灰度修正:改变灰度分布 ---直方图修正 目标(前景):黑的更黑、白的更白 --- 直方图拉伸 干扰(背景):灰度模糊 --- 直方图压缩
直方图修正: (180, 230) (70, 30)
2) 图像滤波 --- 滤波器 图像噪声:强度随机信号 椒盐(Salt & pepper)噪声: 随机出现黑白亮度值 高斯噪声:高斯/正态分布- 传感器噪声模型(摄像机电子干扰噪声等) 高斯噪声
高斯滤波 原始图像
3) 边缘检测 (1) 边缘定义 边缘:图像局部亮度变化最显著的部分 分布:目标-目标、目标-背景、区域-区域 、 色彩-色彩 (2) 边缘检测算子 梯度算子、 Roberts算子、 Sobel算子、Prewitt算子、 拉普拉斯算子、 LoG算子、 Canny算子 4) 图像描述与识别 --- 提取特征参量,识别物体
Sobel 算子 Roberts 算子 原始图像 Canny 算子 Prewitt 算子 LOG 算子 r
离焦 —不清晰、对比度不好 聚焦 —清晰、对比度好 return
夜晚景物图像对比 夜间模式 延长曝光时间 光积分时间短 --- 曝光量小 --- 景物亮度低 --- 对比度差 光积分时间长 --- 曝光量大 --- 景物亮度高 --- 对比度好 return
