Download
1 / 25
280 likes | 578 Views
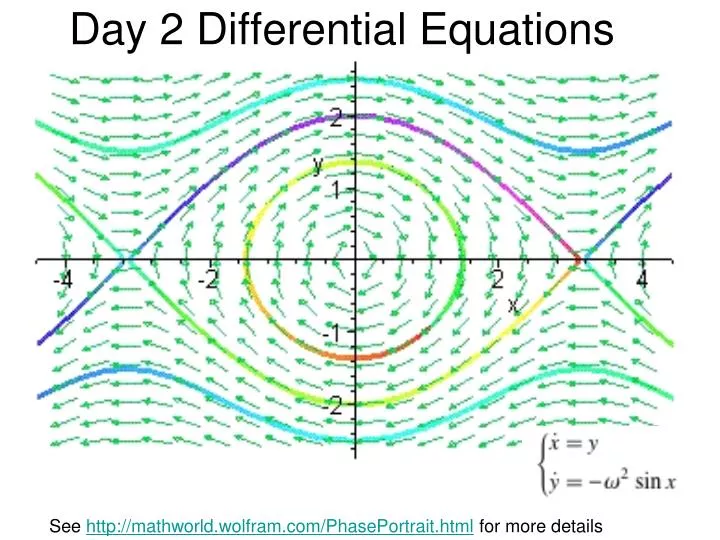
Day 2 Differential Equations. See http://mathworld.wolfram.com/PhasePortrait.html for more details. Stability. A Dynamic System is said to be stable if the system approaches zero as t → ∞. What conditions are necessary for a system to be stable?

E N D
Day 2 Differential Equations See http://mathworld.wolfram.com/PhasePortrait.html for more details
Stability A Dynamic System is said to be stable if the system approaches zero as t → ∞. What conditions are necessary for a system to be stable? Hint: what kinds of values do we need for λ? Recall:
Stability A Dynamic System is said to be stable if the system approaches zero as t → ∞. What conditions are necessary for a system to be stable? All eigenvalues must be negative. If values are complex then the real portion must be negative.
Steady State A Dynamic system is said to be Unstable if the system “blows up” as t → ∞. What conditions will cause unstability? A Dynamic System is said to represent a steady state if the system neither approach zero nor infinity as t → ∞. What conditions are necessary for a steady state?
Stability Unstable: What conditions will cause unstability? One or more positive eigenvalues. Steady State: A Dynamic System is said to represent a steady state if the system approaches a constant value (other than zero) at t → ∞. Eigenvalues all negative (real portion is negative in the case of complex numbers).
Difference equations vs. Differential equations Difference equations - Stable if all │λ│< 1 - Steady state if one or more λ=1 and all other │λ│< 1 - “blows up” if one or more │λ│>1 Differential equations - Stable if all λ < 0 - Steady state if one or more λ = 0 and all other λ < 0 - “blows up” if one or more λ > 0
Phase Portrait Phase Plane Example 1 http://www.youtube.com/watch?v=BU5yTrJ_jFA
Phase Portrait - Example 1 Plug in some points
Phase Portrait - Example 1 Plot the results as vectors
Phase Portrait - Example 1 Follow some of the paths from different starting points (different initial conditions) Notice that the path varies greatly depending upon the initial conditions Usually just the paths are drawn without the vector field One negative and one positive eigenvalue results in a saddle point.
What do the eigenvalues tell you about a system? What if the eigenvalues are both negative? What if the eigenvalues are both positive?
Stability from a phase portrait Positive distinct eigenvalues with eigenvector as the asymptote Negative distinct eigenvalues with eigenvector as the asymptote
Complex Eigenvalue (a + bi) From your knowledge of complex numbers. What do you think the phase portrait will look like if the eigenvalues are complex? Hint consider • Complex Eigenvalues with Re > 0 • Complex Eigenvalues with Re < 0
Complex Eigenvalue - Example 2 Complex Eigenvalues with Re < 0 Complex Eigenvalues with Re > 0
Complex Eigenvalue (a + bi) Complex Eigvenvalues with Re > 0 Complex Eigvenvalues with Re < 0
Complex Eigenvalues (bi) What do you think the phase portrait will look like when the eigenvalues are purely imaginary
Predict the eigenvalues for this system (bi) Eigenvalues are purely complex This is because you end up with eix in your answer e ix = cosx + isinx acosx + bsinx forms and ellipse Center is stable
Phase Diagram - Summary • Draw in the eigenvectors. • +ve eigenvalue arrows away from the origin. • -ve eigenvalue arrows toward the origin. • eigenvalues are real and -ve the system will asymptotically approach the origin along the eigenvectors, arrows inwards (see slide #13 right diagram). • eigenvalues are real and +ve, arrows outwards from origin (see slide #13 left diagram). • Complex eigenvalues (see slide #16): Re portion is –ve, spiral towards origin. Re portion is +ve spiral outwards from origin towards infinity.
Describe the phase portrait [ ] -1 0 x’t = 0 -3 x(t)
Describe the phase portrait [ ] -1 0 x’t = 0 -3 x(t) By inspection the eigen values are -1 and -3 Therefore the system is asymptotically stable the phase portrait will consist of curves that run towards the origin of the form at the right The eigenvectors are therefore the aysmptotes will be on the x and y axis.
More Info http://tutorial.math.lamar.edu/Classes/DE/PhasePlane.aspx http://ocw.mit.edu/courses/mathematics/18-03sc-differential-equations-fall-2011/unit-iv-first-order-systems/qualitative-behavior-phase-portraits/ http://mathlets.org/mathlets/linear-phase-portraits-matrix-entry/comment-page-1/ http://www.bluebit.gr/matrix-calculator/calculate.aspx
What do you think the phase portrait will look like when there is one positive (a repeated eigenvalue) eigenvalue? What do you think the phase portrait will look like when there is one negative eigenvalue?
Notice that the direction of the arrows affects stability Single postive eigenvalue The eigenvector is the asymptote Single negative eigenvalue Eigenvector is the asymptote