Download
1 / 20
1.99k likes | 5.18k Views
Linear Algebra Application: Computer Graphics. By: Gabrien Clark Math 2700.002 May 5 th , 2010. Introduction.

E N D
Linear Algebra Application: Computer Graphics By: Gabrien Clark Math 2700.002 May 5th, 2010
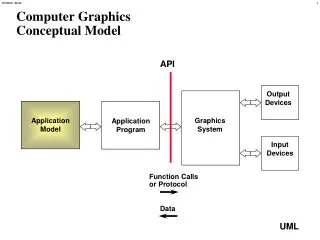
Introduction • In the simplest sense computer graphics are images viewable on a computer screen. The images are generated using computers and likewise, are manipulated by computers. Underlying the representation of the images on the computer screen is the mathematics of Linear Algebra.
2-Dimensional Graphics • Examples of computer graphics are those of which belong to 2 dimensions. Common 2D graphics include text. For example the vertices of the letter H can be represented by the following data matrix D:
3-Dimensional Graphics • 3-Dimensional graphics live in R3 versus 2-Dimensional graphics which live in R2. 3-Dimensional graphics have a vast deal more applications in comparison to 2-Dimensional graphics, and are, likewise, more complicated. We will now work with the variable Z, in addition to X and Y, to fully represent coordinates on the X, Y, and Z axes, or simply space. For example we can represent a cube with the following data matrix D:
Homogeneous Coordinates • Homogeneous coordinates are a system of coordinates used in projective geometry. • They have the advantage that the coordinates of a point, even those at infinity, can be represented using finite coordinates. Often formulas involving homogeneous coordinates are simpler and more symmetric than their Cartesian counterparts.
Homogeneous Coordinates cont. • Each point (x, y) that lives in R2 has homogeneous coordinates (x, y, 1) • Each point (x, y, z) that lives in R3 has homogeneous coordinates (x, y, z, 1) • (X, Y, H) are homogeneous coordinates for (x, y) and (X, Y, Z, H) are coordinates for (x, y, z) • So:
Scaling • A point P with coordinates (x, y, z) is moved to a new point P’ with coordinates (x’, y’, x’) which, in turn, is equivalent to (C1x, C2y, C3z) where the Ci’s are scalars. • What we end up seeing is either an enlargement or diminishment of the original image.
Scaling in 2-Dimensions • The scaling transformation is given by the matrix S= • The transformation is given by the multiplication of the matrices S and A: = =
Scaling in 3-Dimensions • In 3-Dimensions, scaling moves the coordinates (X,Y,Z) to new coordinates (C1, C2, C3) where the Ci’s are scalars. Scaling in 3-Dimensions is exactly like scaling in 2-Dimensions, except that the scaling occurs along 3 axes, rather than 2. • Note that if we view strictly from the XY-plane the scaling in the Z-direction can not be seen, if we view strictly from the XZ-plane the scaling in the Y-direction can not be seen, and if we view strictly from the YZ-plane then the scaling in the X-direction can not be seen. XZ-plane XY-plane YZ-plane
Scaling in 3-Dimensions cont. • The scaling transformation is given by the matrix S= • The transformation is given by the multiplication of the matrices S and A: = =
Translation • Translation is moving every point a constant distance in a specified direction. • The origin of the coordinate system is moved to another position but the direction of each axis remains the same. (There is no rotation or reflection.)
Translation in 2-Dimensions • Mathematically speaking translation in 2-Dimensons is represented by: • Where e1 and e2 are the first two columns of the Identity Matrix, and X0 and Y0 are the coordinates of the translation vector T.
Translation in 3-Dimensions • Mathematically speaking we can represent the 3-Dimensional translation transformation with: • Where e1, e2, and e3 are the first three columns of the Identity Matrix, and X0,Y0, & Z0 are the coordinates of the translation vector T.
Rotation • A more complex transformation, rotation changes the orientation of the image about some axis. • The coordinate axes are rotated by a fixed angle θ about the origin. • The post-rotational coordinates of an image can be obtained by multiplying the rotation matrix by the data matrix containing the original coordinates of the image.
Rotation in 2-Dimensions • Counter-Clockwise Rotation Matrix: • Clockwise Rotation Matrix:
Rotation in 3-Dimensions • Rotation about the x-axis: • Rotation about the y-axis: • Rotation about the z-axis:
Composite Transformations • The movement of images on a computer screen require two or more basic transformations, such as scaling, translating, and rotating. • The mathematics responsible for this movement corresponds to matrix multiplication of the transformation matrices and the data matrix of the homogeneous coordinates.
Works Cited • Lay, David C. Linear Algebra and Its Applications. Boston: AddisonWesley, 2003. Print. • Anton, Howard. Elementary Linear Algebra. New York: John Wiley, 1994. 657-65. Print. • Wikipedia contributors. "Computer graphics." Wikipedia, The Free Encyclopedia. • Wikipedia, The Free Encyclopedia, 3 May. 2010. Web. 4 May. 2010. • Wikipedia contributors. "Rotation matrix." Wikipedia, The Free Encyclopedia. Wikipedia, The Free Encyclopedia, 2 May. 2010. Web. 4 May. 2010. • Jordon, H. Rep. Web. Apr.-May 2010. http://math.illinoisstate.edu/akmanf/newwebsite/linearalgebra/computergraphics.pdf. • Wikipedia contributors. "Homogeneous coordinates." Wikipedia, The Free Encyclopedia. Wikipedia, The Free Encyclopedia, 5 May. 2010. Web. 5 May. 2010.
Works Cited cont. • http://www.swagelok.com/images/cmi/imageLibrary/CAD%20image.jpg • http://primaryvisualcortex.files.wordpress.com/2008/10/necker_cube.png • http://wordnetweb.princeton.edu/perl/webwn?s=translation • http://www.art.unt.edu/ntieva/pages/about/newsletters/vol_14/no_1/TranslationLG.jpg • http://wordnetweb.princeton.edu/perl/webwn?s=rotation • http://homepages.inf.ed.ac.uk/rbf/HIPR2/rotateb.gif