Download
1 / 24
240 likes | 251 Views
A Parametric Model for Oriented, Navigable Surfaces in Virtual Environments. Hongling Wang Joseph Kearney Department of Computer Science University of Iowa. Virtual Environments as Behavioral Laboratories. Gaining widespread acceptance Driving (Uc, Rizzo, Shi, Anderson, and Dawson, 2004;

E N D
A Parametric Model for Oriented, Navigable Surfaces in Virtual Environments Hongling Wang Joseph Kearney Department of Computer Science University of Iowa
Virtual Environments as Behavioral Laboratories • Gaining widespread acceptance • Driving (Uc, Rizzo, Shi, Anderson, and Dawson, 2004; Lee, McGehee, Brown, & Reyes, in press) • Bicycling (Plumert, Kearney, & Cremer, 2004) • Navigating (Murray, Bowers, West, Pettifer, & Gibson, 2000; Warren, Tarr, & Kaebling, NEVLab; Bowman, Davis, Badre, & Hodges, 1999) • Advantages • Near natural • Highly controlled • Safe
Focus of Our Research • Behavioral Studies • Risk Factors for Intersection Crossing • Temperament • Adjustment to Change • Validation Studies • Distance and Motion Perception • Building VE to Support Behavioral Studies • Scenario Control and Behavior Modeling • Vehicles and Pedestrians • Database Modeling • Data Analysis Tools
Virtual Environment • Three 10X8 ft screens (rear projection) • Electrohome DLV projectors -1280x1024 pixels/screen • Square (Cave-like) configuration • Seven networked PCs • Dynamic pedal torque
Roadway Modeling(Willemsen, Kearney, Wang, IEEE VR 2003) • Roads as Ribbons • Oriented Surface • Smooth Strips • Twist and turn in space • Central Axis • Arc-length parameterized curve • Twist Angle • Linked through Intersections
Ribbon • Ribbon coordinate system • Distance, Offset, and loft (D,O,L) • Efficient Mapping (D,O,L) (X,Y,Z) • Egocentric frame of reference
Ribbon Centerline • Modeled by cubic spline Q(t)=(x(t),y(t),z(t)) • Arc-length parameterization • Compute arc length s=A(t) • Compute the inverse function t=A-1(s) • Substitute A-1(s) for t P(s)=(x(A-1(s)),y(A-1(s)),z(A-1(s)))
Arc-length Parameterization • Generally A(t)does not integrate A(t) = • Hence, A-1(s) is not an elementary function • Numeric methods impractical in real-time Solution: Approximately arc-length parameterized cubic spline curve
Approximately Arc-length Parameterized Cubic Spline Curve • Interpolate n input points • Compute length of input curve • Find m+1 equally spaced points on input curve: 0,t1, t2,…,tm-1,m • Interpolate the equally space points to derive a new cubic spline curve
Registration of Slant Curve • Compute the slant cubic spline Q(t) • Based on slant at n input points • Evaluate Q(t) at 0,t1,t2,…tm-1,m • Interpolate Q(t), Q(t1), Q(t2),… Q(tm) to derive a new slant spline that corresponds to the arc-length parameterized ribbon axis
Errors Analysis • Match error • Misfit between the derived and input curves • Measured by difference between the two curves at corresponding points, |Q(A-1(s))-P(s)| • Arc-length parameterization error • Deviation of the derived curve from arc-length parameterization • Measured by formula
Experimental Results (1) m=5 (2) m=10 Experimental curve(blue) and the derived curve (red) with their knot points
Experimental Results (cont.) (1) m=5 (2) m=10 Match error of the derived curve
Experimental Results (cont.) (1) m=5 (2) m=10 Arc-length parameterization error of the derived curve
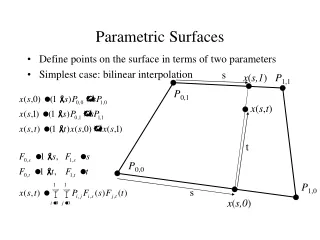
A parametric model for ribbons • A perpendicular line passes through any point on the ribbon • Intersects the central axis at x(s),y(s),z(s) • Parametric surface model
Mapping between Ribbon and Cartesian coordinates • Some computations are most naturally expressed in Cartesian coordinates (D,O,L) • Kinematics code computing object motion • Other computations require object locations expressed in ribbon coordinates (X,Y,Z) • Behavior code tracking roads • Efficient and robust code to map between ribbon and Cartesian coordinates
Intersections—Where Roads Join • Shared regions • Non-oriented • Corridors connect incoming and outgoing lanes • Single lane ribbons • Annotated with right-of-way rules
Ribbon to Ribbon Transitions • Problem: Tangle of Ribbons Bookkeeping Tedious and Error Prone • Possible switch in orientation • Possible shift in alignment • Solution:Paths • Composite ribbons
Path • One-lane Overlay • Removes transitions between ribbons • Immediate Plan of Action • Highly dynamic • Natural frame of reference
Results • Robust and Efficient Code • Daily use • Very reliable • Controllable Accuracy • Flexible • Roadways • Complex Intersections
Summary • Ribbon Framework • Natural frame of reference • Local orientation explicit • Relative distances simple to compute • Intersections • Paths • Short-term • immediate actions
Acknowledgments • NSF Support: INT-9724746, EIA-0130864, and IIS-0002535; National Center for Injury Prevention and Control: R49/CCR721682 • Contributing students, staff, faculty Jim CremerJodie Plumert Hongling Wang Geb Thomas David Schwebel Pete Willemsen Penney Nichols-Whitehead Scott Davis Jennifer Lee Steffan Munteanu Sarah Rains Joan Severson Sara Koschmeder Tom Drewes Ben Fraga Forrest Meggers Kim Schroeder Paul Debbins Stephanie Dawes Bohong Zhang Lloyd Frei Zhi-hong Wang Keith Miller Xiao-Qian Jiang