Download
1 / 1
10 likes | 114 Views
DISEÑO DE UN DEDO ROBÓTICO HUMANOIDE. Máster Universitario en Ingeniería Mecatrónica. Alexandr Kuznetsov UO234400@uniovi.es / Alexandr Kuznetsov@eu4m.eu Tutores : JUAN CARLOS ALVAREZ, Universidad de Oviedo , juan@uniovi.es

E N D
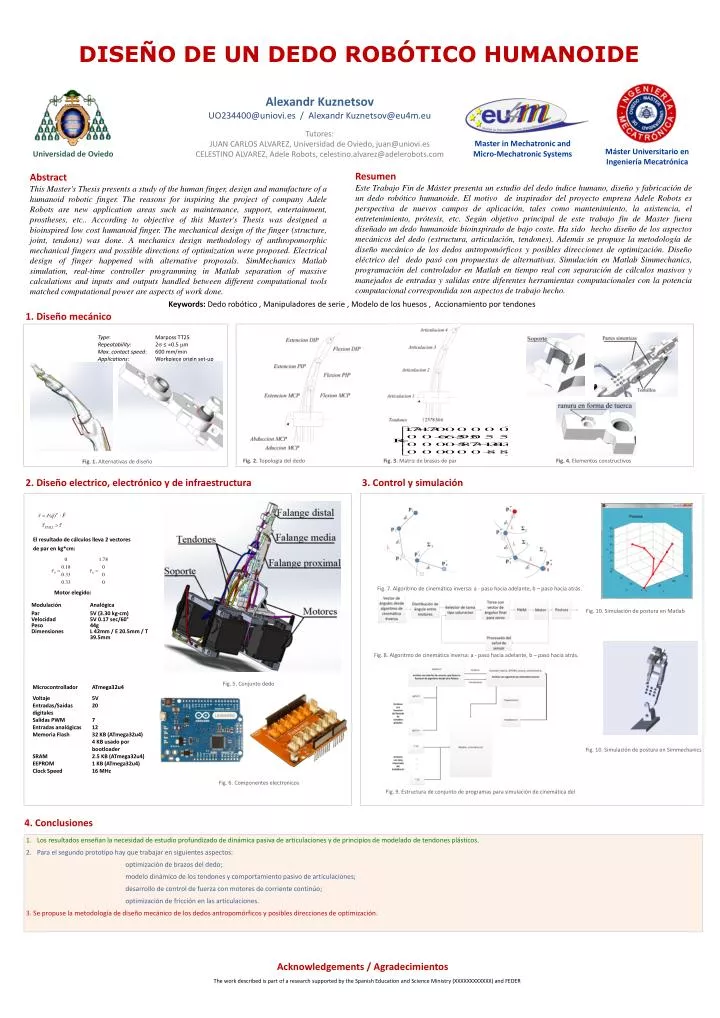
DISEÑO DE UN DEDO ROBÓTICO HUMANOIDE Máster Universitario en Ingeniería Mecatrónica AlexandrKuznetsov UO234400@uniovi.es / Alexandr Kuznetsov@eu4m.eu Tutores: JUAN CARLOS ALVAREZ, Universidad de Oviedo, juan@uniovi.es CELESTINO ALVAREZ, Adele Robots, celestino.alvarez@adelerobots.com Resumen Este Trabajo Fin de Máster presenta un estudio del dedo índice humano, diseño y fabricación de un dedo robótico humanoide. El motivo de inspirador del proyecto empresa Adele Robots es perspectiva de nuevos campos de aplicación, tales como mantenimiento, la asistencia, el entretenimiento, prótesis, etc. Según objetivo principal de este trabajo fin de Master fuera diseñado un dedo humanoide bioinspirado de bajo coste. Ha sido hecho diseño de los aspectos mecánicos del dedo (estructura, articulación, tendones). Además se propuse la metodología de diseño mecánico de los dedos antropomórficos y posibles direcciones de optimización. Diseño eléctrico del dedo pasó con propuestas de alternativas. Simulación en Matlab Simmechanics, programación del controlador en Matlab en tiempo real con separación de cálculos masivos y manejados de entradas y salidas entre diferentes herramientas computacionales con la potencia computacional correspondida son aspectos de trabajo hecho. Abstract This Master's Thesis presents a study of the human finger, design and manufacture of a humanoid robotic finger. The reasons for inspiring the project of company Adele Robots are new application areas such as maintenance, support, entertainment, prostheses, etc.. According to objective of this Master's Thesis was designed a bioinspired low cost humanoid finger. The mechanical design of the finger (structure, joint, tendons) was done. A mechanics design methodology of anthropomorphic mechanical fingers and possible directions of optimization were proposed. Electrical design of finger happened with alternative proposals. SimMechanics Matlab simulation, real-time controller programming in Matlab separation of massive calculations and inputs and outputs handled between different computational tools matched computational power are aspects of work done. Master in Mechatronic and Micro-Mechatronic Systems Universidad de Oviedo Keywords: Dedo robótico , Manipuladores de serie , Modelo de los huesos , Accionamiento por tendones 1. Diseño mecánico Type: Marposs TT25 Repeatability: 2s ≤ ±0.5 mm Max. contact speed: 600 mm/min Applications: Workpiece origin set-up Workpiece measurement Indirect tool compensation Fig. 2.Topologia del dedo Fig. 3.Matrizde brasos de par Fig. 4.Elementosconstructivos Fig. 1.Alternativas de diseño 2. Diseño electrico, electrónico y de infraestructura 3. Control y simulación El resultado de cálculos lleva 2 vectores de par en kg*cm: Fig. 7. Algoritmo de cinemática inversa: a - paso hacia adelante, b – paso hacia atrás. Motor elegido: Fig. 10. Simulación de postura en Matlab Fig. 8. Algoritmo de cinemática inversa: a - paso hacia adelante, b – paso hacia atrás. Fig. 5. Conjunto dedo Fig. 10. Simulación de postura en Simmechanics Fig. 6. Componentes electronicos Fig. 9. Estructura de conjunto de programas para simulación de cinemática del 4. Conclusiones Los resultados enseñan la necesidad de estudio profundizado de dinámica pasiva de articulaciones y de principios de modelado de tendones plásticos. Para el segundo prototipo hay que trabajar en siguientes aspectos: optimización de brazos del dedo; modelodinámico de los tendones y comportamiento pasivo de articulaciones; desarrollo de control de fuerza con motores de corriente continúo; optimización de fricción en las articulaciones. 3. Se propuse la metodología de diseño mecánico de los dedos antropomórficos y posibles direcciones de optimización. Acknowledgements / Agradecimientos The work described is part of a research supported by the Spanish Education and Science Ministry (XXXXXXXXXXXX) and FEDER