Download
1 / 24
240 likes | 246 Views
This presentation discusses techniques for improving routability in floorplanning through accurate congestion estimation and buffer planning. Experimental results show the effectiveness of the proposed approach.

E N D
Routability-driven Floorplanning With Buffer Planning Chiu Wing Sham Evangeline F. Y. Young Department of Computer Science & Engineering The Chinese University of Hong Kong
Overview of Presentation • Introduction • Congestion model • Buffer planning • Implementation • Experimental results • Conclusion
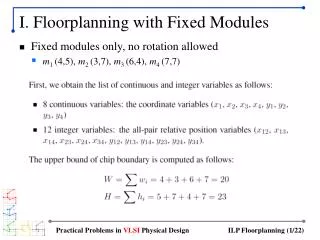
Major Role of Floorplanning • Minimization of chip area • Minimization of interconnect cost • Wirelength • Timing delay • Routability
Our Contributions Improve the routability of the layout by • Accurate estimations of congestion at different locations of the packing • Consider the positions of the buffer blocks
Buffer Planning Buffer planning is important to circuit design • The number of buffer insertions is large and the total size of buffer insertions is significant • Buffers cannot be inserted on macro blocks • Without planning ahead, buffer locations will be poorly chosen or timing closure cannot be achieved
Simulated Annealing Computation of area and wirelength Estimation of buffer usage and buffer resource Estimation of congestion Floorplan Evaluation Move a new packing Design Flow Netlist and module information of a floorplan A floorplan with optimized area and routability
Simulated Annealing Design Flow Netlist and module information of a floorplan A floorplan with optimized area and routability Computation of area and wirelength Estimation of buffer usage and buffer resource Estimation of congestion Floorplan Evaluation Move a new packing
Traditional Congestion Model The probability that wire k passing through this grid, Prob(x,y,k) =4/6 =0.67
Our Congestion Model • Variable interval buffer insertion constraint Adjacent buffers are inserted at distance x[low, up] from each other for some given low and up • Make use of the information of buffer insertions to estimate congestion by probabilistic analysis
Assume that up is 3 and low is 2 Our Congestion Model As the buffers can be inserted in multi-ways: r_success(l) = (P0 + … + Pn)/n, where n is the total number of possible ways for buffer insertions, P0… Pn are the probabilities of successful buffer insertion for each possible way and r_success(l) is the probability of successful buffer insertion for route l.
Assume that up is 3 and low is 2 Our Congestion Model Example: P0 = 1.0*1.0 P0 = 1.0*1.0 P1 = 1.0*0.2 P0 = 1.0*1.0 P1 = 1.0*0.2 P2 = 0.2*0.2 r_success(l) = (P0+P1+P2)/3 = 0.413
Assume that up is 3 and low is 2 Buffer resources, b_prob(x,y) The number of feasible routes pass through each grid for wire k Our Congestion Model The probability that wire k passing through this grid, Prob(x,y,k) =2.00/2.25 =0.89
Our Congestion Model Congestion of the grid (x,y) - Average number of wires passing through the grid (x,y), weight(x,y):
Estimation of the Congestion • Compute these Prob(x,y,k) for all co-ordinates x, y and wires k by dynamic programming • To compute Prob(x,y,k), we can make use of the Prob(x’,y’,k’)s where (x’,y’)s are closer to the source than (x,y) and the distance between (x’,y’) and (x,y) is within the bound [low, up]
Estimation of Buffer Resources Buffer resources at grid (x,y): where b_space(x,y) is the maximum number of buffer insertions allowed at the grid (x, y) which is related to the amount of empty space in that grid and b_weight(x,y) is the estimated total number of buffer insertions required at the grid (x,y)
Implementation of the Floorplanner • Assume variable interval buffer insertion constraint • Estimate the wirelength by MST • Estimate the amount of buffer resources • Evaluate the congestion by probabilistic analysis • Apply two phases simulated annealing
Two Phases Simulated Annealing • Phase 1 • Using simulated annealing • Using cost function including area and wirelength only, C1 • Phase 2 • Using simulated annealing • Using cost function including area, wirelength and congestion estimation, C2
Two Phases Simulated Annealing • Temperature adjustment • Maintain the acceptance rate during the transitional stage by adjusting the temperature • Simulated annealing process can be performed smoothly although the cost function is changed • Calculating the new temperature, new_T = (new_C/ old_C)*old_T
A Simple Global Router • The nets are decomposed into two-pin wires • A wire is routable if it can be routed from the source to the sink in the shortest Manhattan distance without violating the buffer constraints and the congestion constraints • The nets will be routed one after another • The routes satisfying the buffer requirement and with the smallest congestion will be chosen
Experimental Results • Machine used is Pentium IV 1.2GHz with 512 Mb memory • The data sets used are ami33, ami49 and playout • Upper bound and lower bound of the variable interval buffer insertion constraint are approximately equal to 2100m and 4200m for 0.18m technology
Experimental Results Compare our two phases routability-driven floorplanner with buffer planning (F1) v.s. the traditional floorplanner (F2):
Experimental Results Compare our two phases routability-driven floorplanner with buffer planning v.s. the traditional floorplanner:
Conclusion • A routability-driven floorplanner with buffer planning is implemented • The result shows that the floorplan can be less congested and more routable without increasing the area of the floorplan significantly • Runtime is affordable when using two phases simulated annealing