Download
1 / 18
210 likes | 402 Views
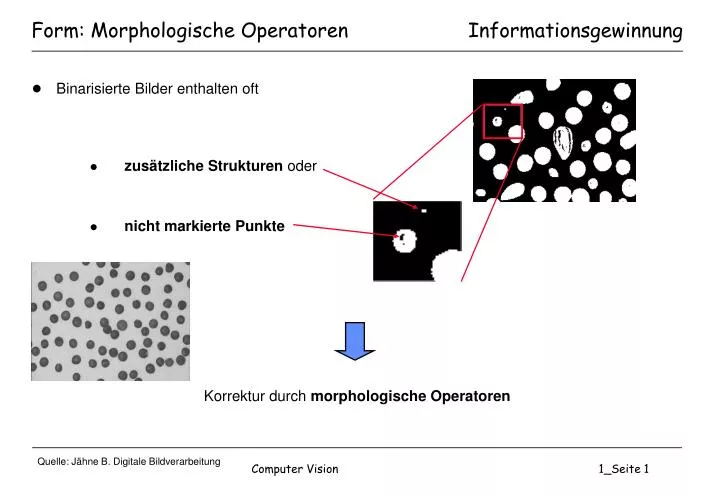
Form: Morphologische Operatoren. Informationsgewinnung. Binarisierte Bilder enthalten oft zusätzliche Strukturen oder nicht markierte Punkte. Korrektur durch morphologische Operatoren. Quelle: Jähne B. Digitale Bildverarbeitung. Form: Erosion und Dilatation. Informationsgewinnung.

E N D
Form: Morphologische Operatoren Informationsgewinnung • Binarisierte Bilder enthalten oft • zusätzliche Strukturen oder • nicht markierte Punkte Korrektur durch morphologische Operatoren Computer Vision 1_Seite 1 Quelle: Jähne B. Digitale Bildverarbeitung
Form: Erosion und Dilatation Informationsgewinnung • Morphologische Operatoren sind lokale Operatoren, die innerhalb bestimmter Nachbarschaften (Fenster, strukturierendes Element) angewandt werden. • Erosion - logische UND-Verknüpfung (bzgl. 255): Ein Bildpunkt wird auf 0 gesetzt, wenn innerhalb des strukturierenden Elements eine 0 vorhanden ist, sonst auf 255. • Dilatation – logische ODER-Verknüpfung (bzgl. 255): Ein Bildpunkt wird auf 255 gesetzt, wenn innerhalb des strukturierenden Elements eine 255 enthalten ist, sonst 0. Computer Vision 1_Seite 2
Form: Opening und Closing Informationsgewinnung • Durch Kombination der Erosion und Dilatation lassen sich morphologische Operatoren zusammensetzen. • Opening: Erst Erosion dann Dilatation • Closing: Erst Dilation dann Erosion Dilatation Erosion Erosion Dilatation Computer Vision 1_Seite 3
Form: morphologische Operatoren Informationsgewinnung • Beispiel: strukturgebendes Element zusätzliche Strukturen Erosion Opening Nicht markierte Punkte Dilatation Closing Computer Vision 1_Seite 4
Form: Extraktion von Rändern Informationsgewinnung • Idee: Randpixel haben zumindest an einer Seite keinen Nachbarn • Ein Erosionsoperator mit einer Maske, die alle möglichen Nachbarn enthält, entfernt alle Randpunkte • Die Mengendifferenz zwischen dem Original und dem erodierten Bild liefert die Randpunkte: g‘: Erosion 3x3 g: Original g = 255 und g‘ = 0 Computer Vision 1_Seite 5
2 1 3 4 0 7 5 6 Form: Darstellung von Objektberandungen Informationsgewinnung Kettencode (8er-Nachbarschaft): • Erstellung: Folge der Richtungen entlang der Kontur ab beliebigem Startpunkt. Beispiel: 22110067665654323 • Der Kettencode ist translationsinvariant. • Kompakte Darstellung (gegenüber Matrixdarstellung des umgebenden Rechtecks) • umgebendes Rechteck: R² bit • Kettencode: ~ R Randpunkte * 3 bit • Ab einem Durchmesser von 10 Bildpunkten ist der Kettencode kompakter. 0 0 1 6 1 7 2 2 Computer Vision 1_Seite 6
2 1 3 4 0 7 5 6 Form: Darstellung von Objektberandungen Informationsgewinnung Kettencode (8er-Nachbarschaft): • Erstellung: Folge der Richtungen entlang der Kontur ab beliebigem Startpunkt. Beispiel: 22110067665654323 • Der Kettencode ist translationsinvariant. • Kompakte Darstellung (gegenüber Matrixdarstellung des umgebenden Rechtecks) • umgebendes Rechteck: R² bit • Kettencode: ~ R Randpunkte * 3 bit • Ab einem Durchmesser von 10 Bildpunkten ist der Kettencode kompakter. 0 0 1 6 1 7 2 2 Computer Vision 1_Seite 7
2 1 3 4 0 7 5 6 Form: Darstellung von Objektberandungen Informationsgewinnung Weitere Prozessierung: • Anfangspunktinvarianz - Startpunkt-Normierung: Verschiebe zirkular so, dass die Sequenz eine Zahl minimaler Größe bildet. Beispiel: 22110067665654323 00676656543232211 • Rotationsinvarianz -Rotationsnormierung: Erste Differenz: Anzahl der Richtungen, die zwei aufeinander folgende Elemente des Codes trennen. Beispiel: 22110067665654323 07070617071777717 • Anfangspunkt und Rotationsinvarianz erhält man wie folgt: Kettencode Rotationsnormierung Startpunktnormierung Beispiel: 22110067665654323 07070617071777717 06170717777170707 0 0 1 6 1 7 2 2 2 1 3 1 7 2 4 0 6 3 4 5 7 5 6 Computer Vision 1_Seite 8
Form: Darstellung von Objektberandungen Informationsgewinnung Zusammenfassung Kettencode: • Translations-, rotations- und startpunktinvariant. • Kompakte Darstellung gegenüber Matrixdarstellung. • Nicht skalierungsinvariant. • Kettencodes unterschiedlicher Länge sind nicht direkt vergleichbar. • Der Kettencode ist eine Polygondarstellung in Pixelgenauigkeit. • Gesucht: Polygondarstellung bzw. Polygonapproximation, die die wesentlichen Berandungseigenschaften mit einer möglichst kleinen Anzahl von Segmenten beschreibt (ein nicht-triviales Problem iterativer Suche). Verfahren durch Überdeckung Computer Vision 1_Seite 9
Form: Darstellung von Objektberandungen Informationsgewinnung Polygonapproximation • Einfache Methode (liefert Polygone mit minimalem Umfang): • Überdecke die Randkurve mit rechtwinklig angeordneten Quadraten • Gerade Verbindungen der Außenecken der umrandeten Fläche Computer Vision 1_Seite 10
Form: Kurven Informationsgewinnung Darstellung der Berandung durch Kurven: r Schwerpunkt (x0,y0)T Position als Funktion der Länge: Problem bei Polygondarstellungen: Die Ecken der Polygone sind nicht äquidistant! Abhilfe: Polardarstellung Computer Vision 1_Seite 11
A A q r q r Schwerpunkt Schwerpunkt Form: Polardarstellung der Obj.-Berandung Informationsgewinnung Polardarstellung: Objektbeschreibung mit Hilfe des Objektradius als Funktion des Winkels. • Vorteil: äquidistante Darstellung. r r A/Ö2 A/2 A/2 q q 2p p 3p/2 p/2 2p p 3p/2 p/2 Computer Vision 1_Seite 12
A q r Schwerpunkt Form: Momente der Objektberandung Informationsgewinnung • Umwandlung der Berandung in eine Kurve (z. B. Polardarstellung) • Berechnung der Momente der Kurve Bei Polardarstellung: r A/Ö2 A/2 q 2p p 3p/2 p/2 Computer Vision 1_Seite 13
Form: Fourier-Deskriptoren Informationsgewinnung Fourierdeskriptoren für diskretisierte Kurven in karthesischen Koordinaten: • Gegeben: geschlossene, äquidistant diskretisierte Kurve • In komplexer Schreibweise • Die diskrete Fouriertransformation (DFT) liefert eine Zerlegung von u in die Summe mit den Koeffizienten • Die Koeffizienten heißen Fourierdeskriptoren und beschreiben die Objektberandung. Computer Vision 1_Seite 14
Form: Fourier-Deskriptoren Informationsgewinnung Eigenschaften der Fourierdeskriptoren • Identität (Eindeutigkeit) • Translation • Skalierung • Anfangspunkt • Rotation Computer Vision 1_Seite 15
Form: Fourier-Deskriptoren Informationsgewinnung Ähnlichkeit von Randkurven mit Fourierdeskriptoren Seien u(s) und v(s) zwei mittelwertfreie Randkurven mit Koeffizienten a(k) und b(k) und mit d(s0) kann für jedes s0 berechnet werden. Das Minimum ist dann ein Ähnlichkeitsmaß für die Formen. Computer Vision 1_Seite 16
2 1 3 4 0 7 5 6 Form: Darstellung von Objektberandungen Informationsgewinnung 0 0 1 6 1 7 0 2 1 2 1 1 Kettencode 8er-Nachbarschaft Kettencode 4er-Nachbarschaft 2 0 3 Computer Vision 1_Seite 17
Form: Darstellung von Objektberandungen Informationsgewinnung Frage: Welcher der beiden Ränder wird durch Erosion und Mengendifferenz geliefert? Erinnerung: strukturgebendes Element Computer Vision 1_Seite 18