Download
1 / 11
110 likes | 183 Views
Obliterator. Jose Noriega. Obliterator. New and Improved. Mission. Patrol surrounding area Detect human presence Target human by simulating motion Power Laser Eradicator Doombringer (LED) cannon Obliterate human. Sensors. MaxBotix Sonar. Parallax PIR. Sharp IR.

E N D
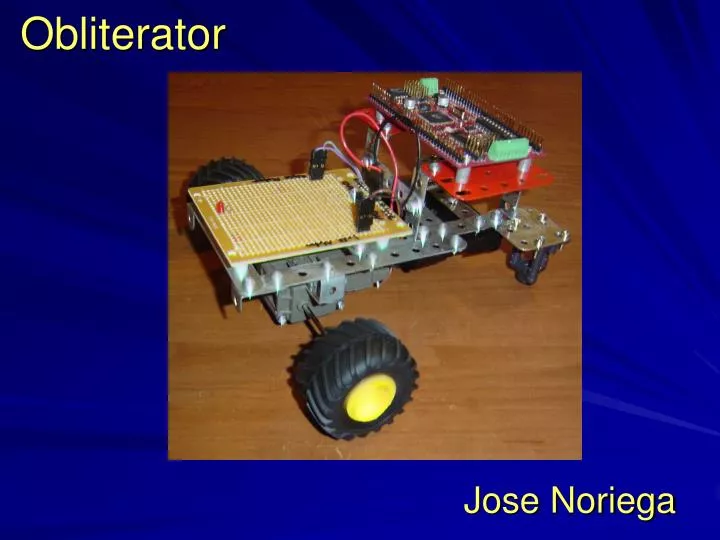
Obliterator Jose Noriega
Obliterator New and Improved
Mission • Patrol surrounding area • Detect human presence • Target human by simulating motion • Power Laser Eradicator Doombringer (LED) cannon • Obliterate human
Sensors MaxBotix Sonar Parallax PIR Sharp IR Titanium Reinforced Bumper
Sensor Data Digital PIR Tests: DistanceObject 6 inches Finger 1.5 feet Arm 4 feet Body 8 feet Flame
Behavior_Arbitrate() Contains 5 IF Statements: IF(Behavior0 == 1 AND all others == 0) Sensors clear, no other behaviors Move Forward IF(Behavior0 == 0 AND Behavior1 == 1) Both sonar detecting object Turn Around IF(Behavior1 == 0 AND Behavior2 == 1 AND Behavior3 == 0) Sonar clear, left IR triggered, right IR clear Turn Right IF(Behavior1 == 0 AND Behavior2 == 0 AND Behavior3 == 1) Sonar clear, left IR clear, right IR triggered Turn Left IF(Behavior1 ==0 AND Behavior2 == 1 AND Behavior3 == 1) Sonar clear, left IR triggered, right IR triggered Turn Around
Motor Driver while( !(UCSR0A & (1<<UDRE0)) ); //Wait for UART to clear UDR0 = 0x80; //Start Byte while( !(UCSR0A & (1<<UDRE0)) ); UDR0 = 0x00; //Device Type while( !(UCSR0A & (1<<UDRE0)) ); UDR0 = 0x01; //Motor # and Direction while( !(UCSR0A & (1<<UDRE0)) ); UDR0 = speed; //Motor Speed (0 to 127) while( !(UCSR0A & (1<<UDRE0)) );
Movement Movement Logic: IF( Check Globals ) //LWheelDir, RWheelDir, LSpeed, RSpeed { //Globals match my desired behavior }ELSE { //Current behavior and desired behavior //do not match. Stop motors and set globals to match behavior. }
PIR Functionality Parallax PIR Few Notes On The PIR Sensor: • Angled up and towards the middle to aim at people • Electrical tape minimizes the number of false positives • PIR behavior overrides all other behaviors • Both have to be triggered to fire
Finishing Touches Obliterated!!!! • Write behavior code for PIR sensor triggers • Write behavior code to simulate motion • Write behavior code to have both PIR acquire target • Combine PIR behavior code with obstacle avoidance • Connect L.E.D. cannon and execute test fires • TEST, TEST, + TEST