Download
1 / 10
110 likes | 212 Views
Les automates programmables. « 1.3. Structure et composants ». Sortie du produit fini. Entrée du produit. PO. Mécanismes opératifs actionneurs. Energie de puissance. Commande de puissance actionneurs. Acquisition des données. Interface de sortie pré-actionneurs. Energie de commande.

E N D
Les automates programmables « 1.3. Structure et composants »
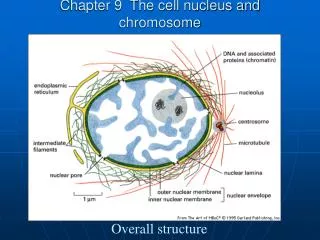
Sortie du produit fini Entrée du produit PO Mécanismes opératifs actionneurs Energie de puissance Commande de puissance actionneurs Acquisition des données Interface de sortie pré-actionneurs Energie de commande Traitement des données PC Interface d’entrée Adaptation des signaux Dialogue homme/machine IHM Structure d’un automatisme (1) P.O. = Partie Opérative P.C. = Partie Commande IHM = Interface homme-machine
INTERNET SUPERVISION Diagnostic distant Réseau local industriel 1 Machine Machine Machine Machine Réseau local industriel 2 Machine Machine E/S déportées Bus de terrain Bus de capteurs/actionneurs Structure d’un automatisme (2)
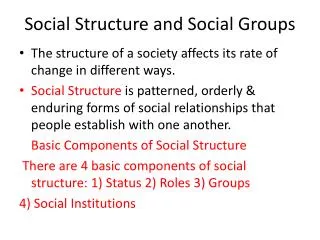
Les composants de l’automatisme • Les capteurs TOR-ANALOGIQUES-NUMERIQUES • Les actionneurs TOR-ANALOGIQUES-NUMERIQUES • Les outils du dialogues opérateurs Boutons poussoirs, commutateur, pupitre, supervision, …. • Les réseaux locaux industriels • Les bus de terrain • Les API, CN, SNCC, Régulateur, PC,…
Les technologies Electromécanique (Logique câblée) Electronique câblée Electronique programmée Electro-pneumatique
vis moteur Table mobile 1 0 t Fin de course gauche Fin de course droite Type d’information TOR tout ou rien (binaire) Les automatismes T.O.R. Capteurs à commande mécanique à commande magnétique
V vis moteur Table mobile V potentiomètre 10 v 0 t Les automatismes ANALOGIQUES
vis moteur Table mobile Piste 1 Piste 2 Piste 3 0 t Les automatismes NUMERIQUES Codeurs rotatifs, codeurs linéaire ou règles
Les pré-actionneurs: Contacteurs Variateur de vitesse Commandes à thyristors Distributeurs Les actionneurs: Moteurs électriques Moteurs pneumatiques Moteurs hydrauliques Vérins pneumatiques Vérins hydrauliques Vannes Aimants permanents Ventouses Résistances de chauffage Electro-aimants pour la manutention Lampes pour l’éclairage et la signalisation Les pré-actionneurs et les actionneurs