Download
1 / 1

E N D
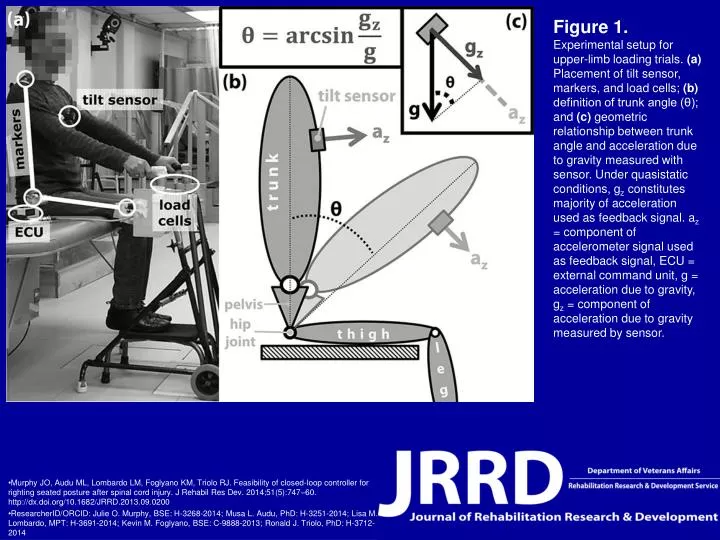
Figure 1. Experimental setup for upper-limb loading trials. (a) Placement of tilt sensor, markers, and load cells; (b) definition of trunk angle (θ); and (c) geometric relationship between trunk angle and acceleration due to gravity measured with sensor. Under quasistatic conditions, gz constitutes majority of acceleration used as feedback signal. az = component of accelerometer signal used as feedback signal, ECU = external command unit, g = acceleration due to gravity, gz = component of acceleration due to gravity measured by sensor. • Murphy JO, Audu ML, Lombardo LM, Foglyano KM, Triolo RJ. Feasibility of closed-loop controller for righting seated posture after spinal cord injury. J Rehabil Res Dev. 2014;51(5):747–60.http://dx.doi.org/10.1682/JRRD.2013.09.0200 • ResearcherID/ORCID: Julie O. Murphy, BSE: H-3268-2014; Musa L. Audu, PhD: H-3251-2014; Lisa M. Lombardo, MPT: H-3691-2014; Kevin M. Foglyano, BSE: C-9888-2013; Ronald J. Triolo, PhD: H-3712-2014
