Download
1 / 1
10 likes | 111 Views
Thrust 3 Affiliated Project: Optimal State Estimators for a Flexible Robotic Arm: Initial Simulation Studies. b. m 2. T. m 1. k. 3. 1. 2. 4. 5. 6. Project Goals:. Support of Strategic Plan:.

E N D
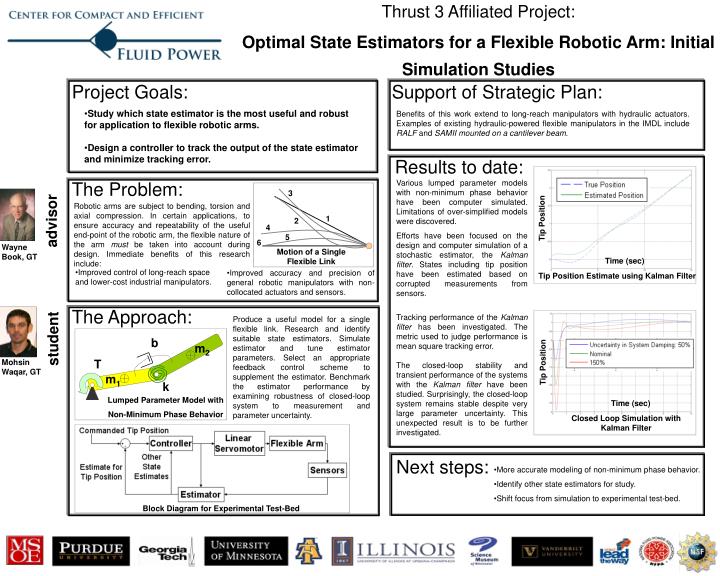
Thrust 3 Affiliated Project: Optimal State Estimators for a Flexible Robotic Arm: Initial Simulation Studies b m2 T m1 k 3 1 2 4 5 6 Project Goals: Support of Strategic Plan: • Study which state estimator is the most useful and robust for application to flexible robotic arms. • Design a controller to track the output of the state estimator and minimize tracking error. Benefits of this work extend to long-reach manipulators with hydraulic actuators. Examples of existing hydraulic-powered flexible manipulators in the IMDL include RALF and SAMII mounted on a cantilever beam. Results to date: The Problem: Various lumped parameter models with non-minimum phase behavior have been computer simulated. Limitations of over-simplified models were discovered. Efforts have been focused on the design and computer simulation of a stochastic estimator, the Kalman filter. States including tip position have been estimated based on corrupted measurements from sensors. Tracking performance of the Kalman filter has been investigated. The metric used to judge performance is mean square tracking error. The closed-loop stability and transient performance of the systems with the Kalman filter have been studied. Surprisingly, the closed-loop system remains stable despite very large parameter uncertainty. This unexpected result is to be further investigated. Robotic arms are subject to bending, torsion and axial compression. In certain applications, to ensure accuracy and repeatability of the useful end-point of the robotic arm, the flexible nature of the arm must be taken into account during design. Immediate benefits of this research include: advisor Tip Position Wayne Book, GT Motion of a Single Flexible Link Time (sec) • Improved control of long-reach space and lower-cost industrial manipulators. • Improved accuracy and precision of general robotic manipulators with non-collocated actuators and sensors. Tip Position Estimate using Kalman Filter The Approach: Produce a useful model for a single flexible link. Research and identify suitable state estimators. Simulate estimator and tune estimator parameters. Select an appropriate feedback control scheme to supplement the estimator. Benchmark the estimator performance by examining robustness of closed-loop system to measurement and parameter uncertainty. student Mohsin Waqar, GT Tip Position Lumped Parameter Model with Non-Minimum Phase Behavior Time (sec) Closed Loop Simulation with Kalman Filter Next steps: • More accurate modeling of non-minimum phase behavior. • Identify other state estimators for study. • Shift focus from simulation to experimental test-bed. Explain the pictures if not obvious Block Diagram for Experimental Test-Bed