Download

1 / 19
200 likes | 389 Views
Multiprocessor Real-time Scheduling. Jing Ma 马靖. Classification. Multiprocessor Scheduling algorithm. Partitioned Scheduling In the partitioned approach, the tasks are statically partitioned among the processors, i.e., each task is assigned to a processor and is always executed on it.

E N D
Multiprocessor Real-time Scheduling Jing Ma 马靖
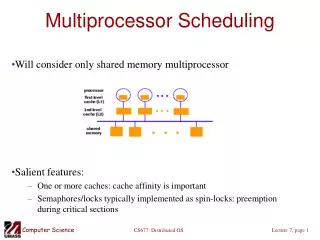
Classification Multiprocessor Scheduling algorithm Partitioned Scheduling In the partitioned approach, the tasks are statically partitioned among the processors, i.e., each task is assigned to a processor and is always executed on it. Global Scheduling Under global scheduling, it is permitted that a job that has previously been preempted from one processor resume execution at a later point in time upon a different processor.
1 2 3 static dynamic but fixed within a job fully dynamic Uniprocessor Scheduling Algorithm By priority:
Rate Monotonic (RM) Scheduling Assumption: • All tasks that have hard deadlines are periodic. • All tasks are independent. • di=pi, for all tasks. • ci is constant and is known for all tasks. • The time required for context switching is negligible • For a single processor with n tasks, the following equation holds for the accumulated utilization µ:
Rate Monotonic (RM) Scheduling • The priority of a task is a monotonically decreasing function of its period. • At any time, a highest priority task among all those that are ready for execution is allocated. If all assumptions are met, schedulability is guaranteed. The idle capacity is not required if the period of all tasks is a multiple of the period of the highest priority task
EDF scheduling • each time a new ready task arrives, it is inserted into a queue of ready tasks, sorted by their deadlines. If a newly arrived task is inserted at the head of the queue, the currently executing task is preempted
EDF scheduling Earlier deadline preemption Later deadline no preemption
LLF (Least Laxity First) • Priorities = decreasing function of the laxity (the less laxity, the higher the priority); • dynamically changing priority; • preemptive. Requires calling the scheduler periodically, and to recompute the laxity. Overhead for many calls of the scheduler and many context switches. Detects missed deadlines early.
Partitioned Scheduling • Several polynomial-time heuristics have been proposed for solving this problem. (eg. FF and BF) the worst-case achievable utilization on M processors for all of the heuristics (and also for an optimal partitioning algorithm) is only (M+1)/2, even when an optimal uniprocessor scheduling algorithm such as EDF is used.
1 2 3 no migration In partitioned scheduling algorithms, the set of tasks is partitioned into as many disjoint subsets as there are processors available, and each such subset is associated with a unique processor. migration allowed (Restricted migration) Each job must execute entirely upon a single processor. However, different jobs of the same task may execute upon different processors. unrestricted migration Classification
Global Scheduling • PD2 PD2 incurs significant run-time overhead due to its quantum-based scheduling approach. • EKG EKG concentrates workloads on some processors due to the approach similar to partitioned scheduling. • LNREF energy efficient compare to other algorithm
Future Trend (I guess) • Combine with other algorithm RT-DVFS(real-time dynamic voltage and frequency scaling) • Reduce Overhead • Uncertain Task Execution Time
reference • Energy-efficient Optimal Real-Time Scheduling on Multiprocessors,Kenji Funaoka, Shinpei Kato, IEEE, 2008.19 • Energy-Aware Scheduling for Real-Time Multiprocessor Systems with Uncertain Task Execution Time, Changjiu Xian, Yung-Hsiang Lu, Zhiyuan Li, DAC, June 4-8 2007 • Scheduling Algorithms and Operating Systems Support for Real-Time Systems, Krithi Ramamritham, John A. Stankovic, IEEE Vol 82, No. 1, January 1994 • An Optimal Real-Time Scheduling Algorithm for Multiprocessors, Hyeonjoong Cho, Binoy Ravindran, 27th IEEE International Real-Time System Symposium, 2006 • http://www.cise.ufl.edu/~prabhat/Teaching/cis6930-s09/slides/softwareComponents.ppt