Download
1 / 40
400 likes | 564 Views
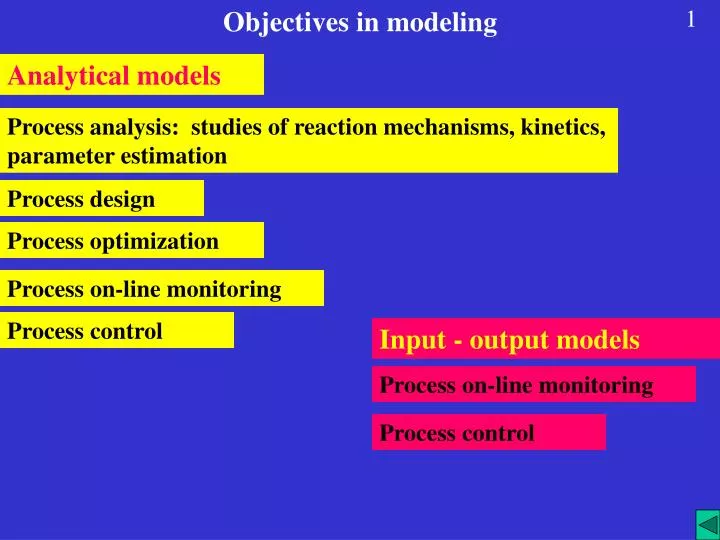
Objectives in modeling. Analytical models. Process analysis: studies of reaction mechanisms, kinetics, parameter estimation. Process design. Process optimization. Process on-line monitoring. Process control. Input - output models. Process on-line monitoring. Process control.

E N D
Objectives in modeling Analytical models Process analysis: studies of reaction mechanisms, kinetics, parameter estimation Process design Process optimization Process on-line monitoring Processcontrol Input - output models Process on-line monitoring Processcontrol
Fuzzy logic models In fuzzy logic models input and output spaces are covered or appro-ximated with discourses of fuzzy sets labeled as linguistic variables For example, if Ai X is an i-th fuzzy set it is defined as an ordered pair: where x(t) is a scalar value of an input variable at time t, and A is called a membership function which is a measure of degree of mem-bership of x(t) to Ai expressed as a scalar value between 0 and 1. Typical membership functions have a form of a bellshaped or Gaussian, triangular, square, truncated ramp and other forms
Grafički (Venn-ov) dijagram prikaza dvaju izrazitih (A) i neizrazitih (B) skupova S i T. Izraziti skupovi su disjunktni, a kod neizrazitih skupova neki elementi istovremeno pripadaju u oba skupa. Stupanj pripadnosti neizrazitom skupu izražena je intenzitetom sive boje.
Prikazi funkcija pripadnosti (T) fizikalne veličine temperatura T skupovima (A) “tekuća voda” i (B) “hladna voda”
Fuzzy Logic Inference Systems ( Mamdani Model ) Logical rules with linguistic variables AX AY Y X Input space of linguistic variables Input space of physical variables Output space of linguistic variables Output space of physical variables
Input output relationships are modeled by fuzzy inference system, FIS. • It is based on fuzzy logic reasoning which is a superset of classical Boolean logic rules for crisp sets. • Elementary logic operations with fuzzy sets are: • fuzzy intersection or conjunction ( Boolean AND ) A typical choice of T-norm operator is a minimum function corresponding to Boolean AND, i.e.: and standard choice to Boolean OR and NOT:
Process of mapping scalar between input and output sets by Fuzzy Inference System. Fuzzy inference Fuzzification Defuzzification y(t) x(t)
Sugeno (1988) Fuzzy Inference System Logic relations X AX Z Y Spaceof input variables (numbers) Space of input logic variables Space of singelton MF (numbers) Space of output variables (numbers) Developed for process modeling and identification. Application in adaptive neural fuzzy logic systems ANFIS
In Sugeno FIS for fuzzy inference polynomial Pn approximation is applied Y = Pn ( Z ), usually a linear model is used Y = C1 Z + Co , C1 and Co are constants Mapping to scalar variables is obtained by averaging y = WT Y
Example: Fuzzy logic control of flow rate flow rate valve position T BIOPROCESS FUZZY LOGIC MODEL pH Q For example, consider a fuzzy logic model of control of a flow rate ( position of a valve piston) based on input values of temperature T and pH
FIS model Q=f(T,pH) FUZZY INFERENCE SYSTEM OUTPUT SPACE OF LINGUISTIC VARIABLES INPUT SPACE OF LINGUISTIC VARIABLES FUZZY RULES AGGREGATION FUZZIFICATION DEFUZZIFI- CATION OUTPUT DATA Q(t) INPUT DATA T(t) pH(t)
LOW pH LOW T pH T GOOD pH GOOD T pH T HIGH pH HIGH T pH T pH(t) T(t)
List of the fuzzy rules for control of valve position IF T is low AND pH is low OR good THEN valve is half open IF T is low AND pH is low THEN valve is open IF T is high AND pH is high THEN valve is closed IF T is high AND pH is low THEN valve half open IF T is good AND pH is good THEN valve half open
Membership function of the fuzzy sets in the output space HALF CLOSED CLOSED VALVE VALVE OPEN VALVE
Aggregation of fuzzy consequents from fuzzy inference system FIS into a single fuzzy variable output (t) FIS rules VALVE centroid y(t) = valve position Aggregation to output
Schematic representation of a neurone with a sigmoid activation function x1 x2 x3 O xi xN
Schematic diagram of a feedforward multilayer perceptron X1 Y1 X2 Y2 X3 Y3 X4 I H O
Model equations Methods of adaptation: On-line back propagation of error with use of momentum term Batch wise use of conjugate gradients ( Ribiere-Pollack, Leveberg-Marquard)
NN models for process control NNARX: Regressor vector: Predictor: NNOE: Regressor vector: Predictor:
Inverse neural network control Compensation of process noise ? n Y XI NN-1 PROCESS Input information on reference transients of output variables
Inverse neural network control coupled with a PID feedback loop n Y XI NN-1 - + PID - PROCESS
Internal model control structure n3 n1 n2 NN -1 PROCESS Y xI - - + NN
Chemostat as a single input single output SISO system D S CHEMOSTAT NN
CHEMOSTAT SISO MODELS NN NN-1
Responses of concentration of substrate chemostat to asine perturbation of reference concentration obtained with direct inverse control. Reference signal is plotted as a solid curve and response is dotted. Frequency of perturbations are A: 0,0125 min-1; B: 0,025 min-1; C: 0,2 min-1; D: 0,1 min-1 B A D C
Responses of substrate (s), dilution rate (D), product (p), and biomass (x) under direct inverse neural network control. Reference signal is a series of square impulses of substrate. The chemostat responses are dotted lines and the reference is a solid line. s D p x
Responses of substrate under direct inverse neural (….) network control and internal model (….) control .
Comparison of direct inverse neural network control and internal model neural network control with 7,5% relative standard noise in substrate measurement S 0 100 200 Time (min)
NN from B. yeast production in deep jet bioreactor (Podravka) 3-run 2-run 1-run 15 h 15 h 15 h EtOH Measured NN model
Adaptive neuro fuzzy inference system ANFIS Integration of neural networks with fuzzy logic modeling. ANFIS does not require prior selection of fuzzy logic variables ANFIS does not require prior logic inference rules ANFIS requires only sets of input and output training data ( like for NN modeling ) ANFIS has Sugeno structure of fuzzy logic systems
ANFIS provides fuzzy logic clustering of data to artificial linguistic variables. ANFIS provides adaptive membership functions for definition of association of data to linguistic variables (fuzzy variables). ANFIS provides combinatorial generation of logical relations for mapping between input and output fuzzy sets. ANFIS provides adaptation of parameters in Sugeno mapping. ANFIS provides back propagation method for adaptation of model to training data.
ANFIS model of chemostat D(k)=f [ Sref,S(k),S(k-1)] Input MF output MF not Sref or and S(k) D(k) output S(k-1) input rules Sugeno i/o mapping
Demo DEMO PROGRAMS
Conclusions Neural networks NN and Fuzzy logic inference (FIS) systems are very practical methods for modelling and control of bioprocesses. Advanced computer supported instrumentation for physical, chemical and biological variables provide large data banks applicable for training NN and FIS models. NN and FIS are best suited for on-line monitoring, soft identification and nonlinear multivariable adaptive control. Unlike analytical models, NN and FIS can be developed without “a priori” fundamental knowledge of a process. Analytical models are “very expensive” to develop, but they are the most valuable engineering tool.
NN and FIS can integrate knowledge in a very general form. Information from on-line instruments, image analysis and human experience can be easily incorporated. Analytical models are excellent for extrapolation in the entire process space, while NN and FIS are the best at interpolation in the training set and need to be tested for extrapolation outside training. Integration of NN and FIS into Adaptive Neural Fuzzy Inference Systems ANFIS leads to models which combine the best properties of NN and FIS. ANFIS are highly adaptive like NN, they are transparent for logical rules like FIS, automatically generate linguistic variables and logical rules, and are trained to extensive process data.
Model verification of NN, FIS and ANFIS is the most important step before their application in laboratory and industrial practice.