Download
1 / 7

E N D
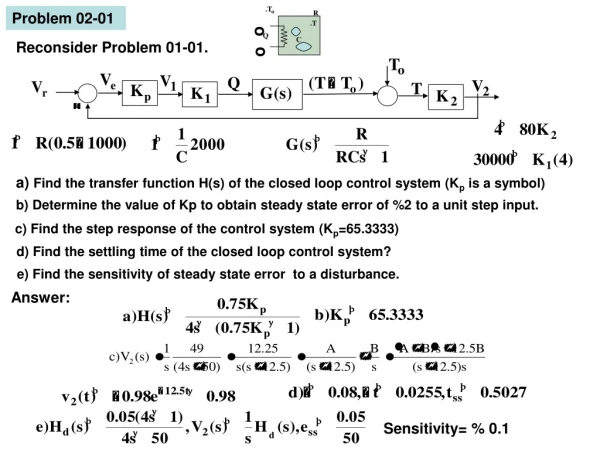
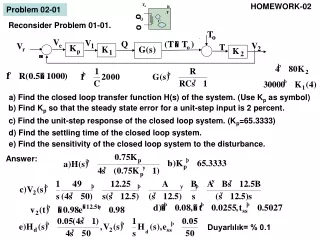
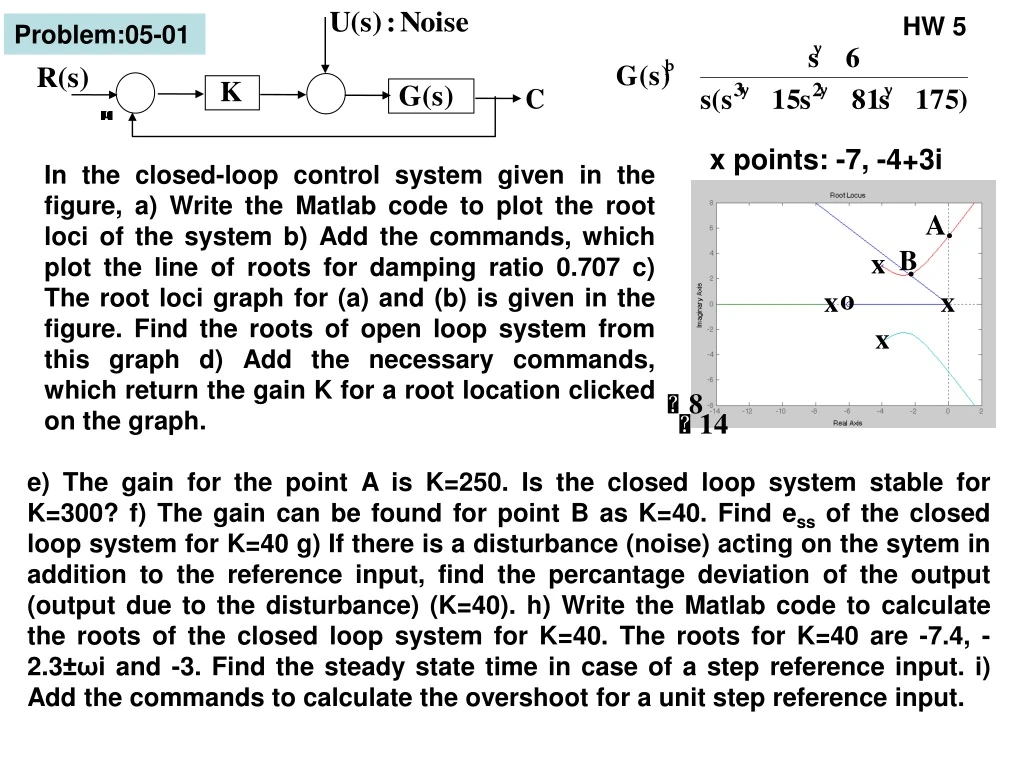
x points: -7, -4+3i HW 5 Problem:05-01 In the closed-loop control system given in the figure, a) Write the Matlab code to plot the root loci of the system b) Add the commands, which plot the line of roots for damping ratio 0.707 c) The root loci graph for (a) and (b) is given in the figure. Find the roots of open loop system from this graph d) Add the necessary commands, which return the gain K for a root location clicked on the graph. e) The gain for the point A is K=250. Is the closed loop system stable for K=300? f) The gain can be found for point B as K=40. Find ess of the closed loop system for K=40 g) If there is a disturbance (noise) acting on the sytem in addition to the reference input, find the percantage deviation of the output (output due to the disturbance) (K=40). h) Write the Matlab code to calculate the roots of the closed loop system for K=40. The roots for K=40 are -7.4, -2.3±ωi and -3. Find the steady state time in case of a step reference input. i) Add the commands to calculate the overshoot for a unit step reference input.
HW 5 SOLUTIONS x points: 0,-7, -4+3i clc;clear num=[1 6]; den=[1 15 81 175 0]; rlocus(num,den) ksi=0.707;wn=10; sg=-ksi*wn;w=wn*sqrt(1-ksi^2); hold on;plot([0 sg],[0 w] rlocfind (num,den) a) b) d) c) The roots of the open loop system are marked with x. p1=0 p2=-7 p3,4= -4±3i
HW 5 SOLUTIONS Variation of error versus time. e) Kcr=250 if K=250 for point A. For K=300, two roots of the closed loop system are located on the right hand side of the imaginary axis and then the system becomes unstable. f) ess for K=40 g)
HW5 SOLUTIONS For real roots h) roots([1 15 81 215 240]) clc;clear num=[40 240]; den=[1 15 81 215 240]; hs=tf(num,den) [c,t]=step(hs); overs=max(c)-c(length(c))
Thompson (Sh. 157) Problem 05-02 Write the Matlab code to plot the root locations of the closed loop system. Write the command to find the Kcr. Find Kcr using Routh method. Is the closed loop system stable for K=1? Write the commands to find the gain K, for the roots having damping ratio 0.65. • Write the Matlab code • to find the roots • to plot the step response of the system • to find the overshoot of the response; for K=9 Find the steady state error to a step reference input for K=9. Determine the sensitivity to disturbance. What kind of controller should be added in order to make the steady state error and sensitivity to disturbance to be zero? What kind of controller should be added to reduce the overshoot?
HW 5 SOLUTIONS clc;clear num=[1 3]; den=[1 -2 2]; rlocus(num,den) rlocfind(num,den) ksi=0.65;wn=20; sg=-ksi*wn;w=wn*sqrt(1-ksi^2); hold on;plot([0 sg],[0 w] rlocfind(num,den) We will find K≈2 K≈9 The system is UNSTABLE for K=1.
HW 5 SOLUTIONS Roots clc;clear K=9; num=[K 3*K]; den=[1 K-2 3*K+2]; roots(den) hs=tf(num,den) [c,t]=step(hs); overs=max(c)-c(length(c)) Overshoort = 0.37 %37 css=? for K=9 Integral Controller to reduce (or eliminate) the steady state error and sensitivty Derivative Controller to reduce the overshoot



![ANCIENT GREECE [Map 05-01]](https://cdn3.slideserve.com/5762335/slide1-dt.jpg)