Download
1 / 26

E N D
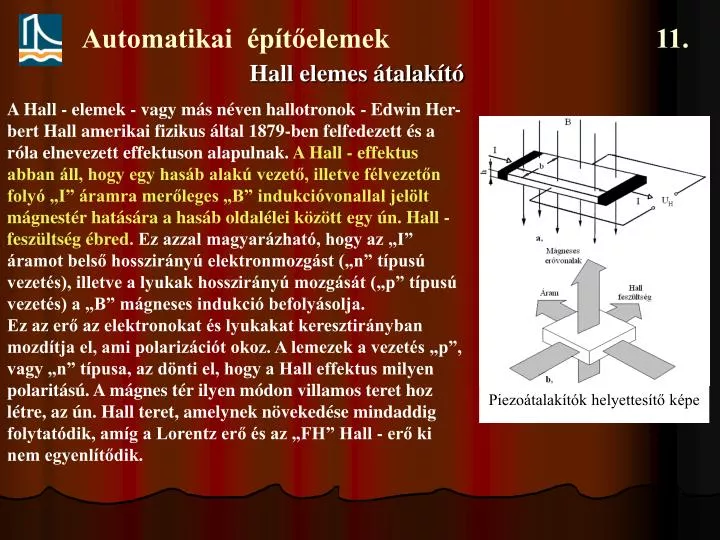
Piezoátalakítók helyettesítő képe A Hall - elemek - vagy más néven hallotronok - Edwin Her-bert Hall amerikai fizikus által 1879-ben felfedezett és a róla elnevezett effektuson alapulnak. A Hall - effektus abban áll, hogy egy hasáb alakú vezető, illetve félvezetőn folyó „I” áramra merőleges „B” indukcióvonallal jelölt mágnestér hatására a hasáb oldalélei között egy ún. Hall - feszültség ébred. Ez azzal magyarázható, hogy az „I” áramot belső hosszirányú elektronmozgást („n” típusú vezetés), illetve a lyukak hosszirányú mozgását („p” típusú vezetés) a „B” mágneses indukció befolyásolja. Ez az erő az elektronokat és lyukakat keresztirányban mozdítja el, ami polarizációt okoz. A lemezek a vezetés „p”, vagy „n” típusa, az dönti el, hogy a Hall effektus milyen polaritású. A mágnes tér ilyen módon villamos teret hoz létre, az ún. Hall teret, amelynek növekedése mindaddig folytatódik, amíg a Lorentz erő és az „FH” Hall - erő ki nem egyenlítődik. Automatikai építőelemek 11. Hall elemes átalakító
Példa az alkalmazásra Nem villamos mennyiségek mérésénél elsősorban elmozdulás, szögelfordulás mérésnél használjuk, illetve az erre visszavezethető mennyiségek (erő, nyomás stb.) mérésére. Amennyiben a Hall elem félvezető lemeze a „B” mágneses indukcióvonalakkal párhuzamos, akkor Hall feszültség nem keletkezik (UH = 0), de amint a lemez „α” szöggel elfordul, akkor a keletkezett feszültség: Automatikai építőelemek 11. „κ” - a töltéshordozók mozgékonysága (m2/V.s) „h” - a lemez vastagsága „κ . ρ” szorzatot Hall állandónak nevezzük. RH „A” = állandó, amely fémeknél A = 1 és félvezetőknél A = 2/8; „n” és „p” a térfogategységben lévő szabad elektronok és lyukak száma; „κp” és „κn” ezeknek a mozgékonysága „e” az elemi töltéshordozók töltése. Hall elemes átalakító
Alkalmazások Automatikai építőelemek 11. 1. Mágneses fluxussűrűség (B) mérése. Állandó vezérlőáram esetén „UH” a „B” mágneses fluxussűrűséggel arányos. A kis Hall-generátorok (kb.2×1 mm2) térszondaként használhatók és inhomogén mágneses terek mérését teszik lehetővé. Közvetve, a mágneses téren keresztül, pl. nagy egyenáramok megmérhetők velük. 2. Az „I .B” szorzat mérése. A Hall-feszültség arányos mind az „I” vezérlőárammal, mind a „B” mágneses fluxussűrűséggel. Nagysága az „I.B” szorzattól függ. A Hall-generátor szorzóként működik. A mágneses fluxussűrűség arányos lehet egy „IM” árammal. Ebben az esetben a Hall-generátor két áramot szoroz össze egymással. Az effajta analóg szorzókra az analóg számítástechnikában, a vezérlés- és szabályozástechnikában van szükség. Hall elemes átalakító
Automatikai építőelemek 11. 3. Ha a Hall-generátort állandó amplitúdójú változó mágneses térbe helyezzük, akkor a vezérlő egyenáram mellett váltakozó Hall-feszültség keletkezik, ami a „B” mágneses fluxussűrűséggel arányos. A Hall-generátor modulátorként vagy érintkező nélküli egyenáram - váltakozó áram átalakítóként működik. 4. A „B” mágneses fluxussűrűség kis teljesítménnyel vezérelhető. A Hall-generátorról nagyobb teljesítménnyel vehető le. A Hall-generátornak ekkor erősítő jellege van. 5. A Hall-generátor alkalmas mágneses terek kimutatására. Ha a Hall-generátor közelében pl. állandómágnest mozgatunk, akkor Hall-feszültség keletkezik. Ezen a módon egyszerű fordulatszámmérés valósítható meg. Hall elemes átalakító
Frekvencia és impulzuskimenetű átalakítók Frekvenciakimenetű és digitális átalakítók A frekvenciakimenetű és digitális átalakítók a mérendő mennyiséget impulzuszámmá illetve frekvenciává alakítják át, a digitális kimenetű átalakítók kimeneti mennyisége pedig számjegy. Ezeket az átalakító típusokat gyakran alkalmazzák digitális rendszerekben, mert gyors működésűek, nagy pontosságúak, jól kódolhatóak és az automatizált méréseknél jól alkalmazhatók. Automatikai építőelemek 11. Az impulzusok számlálására elvben bármely impulzusmodulációs eljárással megoldható, mint pl. PAM (amplitúdó), PPM (helyzet), PDM (szélesség), PFM (frekvencia) és PCM (kód) modulációval. A gépipari méréseknél a gyakorlatban főleg PFM terjedt el. Diszkrét átalakítók • Ezek segítségével valamilyen jellegzetes mérőelem (osztásos léc-tárcsa; kódléc-tárcsa; áramlásmérő osztásos forgóeleme stb.) letapogatható és ez által keletkezik a diszkrét impulzusokból álló modulált jelsorozat. • A letapogatás történhet: • galvanikus • optikai • mágneses úton
Mágneses letapogatás elve Optikai letapogatás elve Galvanikus letapogatás A legegyszerűbb érintkezők útján történik és éppen ezért szennyeződésre hajlamos. Ma már általában nem, vagy igen ritkán alkalmazzák. Automatikai építőelemek 11. Optikai letapogatás Ez a letapogatási módszer a legolcsóbb. Látható, hogy ebben az esetben a fényforrás és a fényérzékeny elem együtt mozog. Köztük van elhelyezve az átlátszó (fehér) és sötét (fekete) mérőket tartalmazó maszk. A maszk helyett gyakran egy optikai rácsot alkalmaznak. Itt a világos és sötét osztás egy 1 μm is lehet. A fényérzékeny elem lehet fotoellenállás, fotodióda és fototranzisztor. Mágneses letapogatás A mágneses letapogatás eszköze a mérőléc. A mágneses mérőléc egy ferromágneses anyagból készült egyenes vonalzó, amely egyenletes osztásokban furatokat és azokban elhelyezett nem mágnesezhető anyagokat tartalmaz. A mágneses vonalzót mágneses mérőfej tapogatja le, amely akkor ad jelet, ha nem áll pontosan a nem mágneses betét középpontja felett.
Egyéb megoldások Amelyeket eddig nem tárgyaltunk az itt látható megoldások közül a fogas tárcsa, és tükrös hasáb alkalmazása, továbbá a reluktáns és kapacitív átalakító. Ezeket részletesebben azért nem tárgyaljuk, mert másutt ezek működését részleteztük, így itt csak felhasználjuk a tanult tulajdonságokat. Automatikai építőelemek 11.
Automatikai építőelemek 11. Kódolt digitális jelek feldolgozása A kódolt digitális jeleket előállító átalakító a mérendő „xm” mennyiséget előbb kvantálja, majd az így nyert értéket kódolja, és így viszi át. A kódolás két szimbólumkészlet egymáshoz rendelését jelenti. A tárgyalt esetben tehát a mérendő jelből két művelettel állítják elő a feldolgozandó jeleket: kvantálás és kódolás.
Kvantálás A kvantálás során a mérendő mennyiség értéktartományának véges számú – általában egyenlő nagyságú- résztartományra történő felosztása történik. Mivel kvantálással kizárólag véges számú érték képezhető, az analóg mennyiség viszont végtelen sok értéket vehet fel, ezért a kvantálás csak adott hibával végezhető el. Ezt a hibát kvantálási hibának nevezzük. A kvantálási hiba függ a teljes tartományt felosztó osztási pontok számától. Automatikai építőelemek 11. Kódolás A kódolás általános értelemben két szimbólumhalmaz egyértelmű egymáshoz rendelését jelenti. Digitális méréseknél kódoláson a nyers értékek olyan átalakítását értjük, amely további feldolgozás szempontjából szükséges, illetve előnyös. Digitális rendszerek szimbólumkészlete 1 és 0. Egy tetszőleges számrendszerbeli, ha úgy tetszik kódszót, a következő alakban írhatunk fel: ahol: „R” a számrendszer alapszáma (kettes számrendszernél R=2) és a „Ci” az „i”-ik helyiértéken álló szám (a 0≤ Ci ≤R – 1 egyenlőtlenség mindig fenáll). S = 5 .102 + 1 .101 + 8 .100 = 518 R = 2; n = 7 S = 1 .26 + 1 .25 + 0 .24 + 0 .23 + 1 .22 + 1 .21 + 1 .20 = 103
Az alábbi táblázat tartalmazza az ipari mérésekben alkalmazott fontosabb kódokat. A táblázatból látható, hogy négyelemes kódszavakat alkalmaznak, amelyeket tetrádoknak nevezzünk. A legelterjedtebb kódok a következők Automatikai építőelemek 11. BCD kód Ennél a kódolási típusnál adott decimális számhoz megfelelő bináris szám tartozik. A súlyozási tényező összege az adott decimális számot adja. Excess 3 kód Más néven 3 többletes kódnak is nevezik ezt a kódtípust. Az egyes decimális számokhoz a nála hárommal nagyobb decimális számok bináris kódját rendelik. (pl.: 5→5+3=81000) Gray :Ennek van a gépészetben talán a legnagyobb jelentősége. A két szomszédos kódszó csak egyetlen elemben tér el egymástól. Ez a tulajdonsága különösen alkalmassá teszi pl. a helyzet (szöghelyzet) mérési feladatoknál.
Kódtárcsa kialakítása Automatikai építőelemek 11. A kódléc ötelemes, a tárcsa pedig 10 elemes kódszóból áll. A fekete szín a bináris egyet, a fehér pedig a bináris 0-át jelenti. Amennyiben a kódtárcsa érintkező sávjai helyzetének megfelelően a tárcsához egy tíz érintkezőből álló sugárirányban rögzített érintkezősort nyomunk hozzá, akkor az érintkezősor kimenetein a szögelfordulás bináris számjegyek formájában alakítható át. Lehetséges optikai megoldás is.
Induktív érintésnélküli mérőfej Kinematikai mennyiségek mérése Út (távolság) mérése Alapfogalmak A mozgó test pályájának vizsgált szakaszát a test által megtett útnak nevezzük. A mozgási pálya egy meghatározott pontja, ahol a test éppen tartózkodik az a pillanatnyi mozgási helyzet. Körpálya Ha a mozgás speciális körpályán megy végbe, akkor a mozgási adatok megadásaszögadatonként történik. Ekkor az útnak a szögelfordulás, helyzetnek pedig a szöghelyzet felel meg. Továbbiakban célszerű különbséget tenni a kis, és nagy elmozdulás, illetve szögelfordulások között. Automatikai építőelemek 11. Kis elmozdulások mérése Erre a célra általában induktív, és kapacitív érzékelőket használnak. Induktív érintés nélküli mérőfejek láthatók az ábrán, a jelölései a következők: 1- tekercs, 2- ház a menetes résszel, 3- szigetelőrész, 4- mag, és villamos csatlakozás. Ezt a megoldást napjainkra már többszörösen tökéletesítették, de az ábrán látható elv ugyanaz maradt. Párban használják, és többféle méretben készül néhány V-os (2…10V) és néhány kHz-es (2...10kHz) frekvenciára. Általában 10-4 mm-től néhány tized mm felső határig működik
Induktív távolságérzékelő Az ilyen típusú mérésekhez javasolt kétféle alapkapcsolás az ábrán látható. Bármely gyártó állítja elő a mérőfejeket, az elv a látottakkal azonos. Különleges célokra állítanak elő egyes gyártó cégek olyan mérőfejeket, amelyek 1µm…1mm közötti mérőtartományban működtethetők Automatikai építőelemek 11.
Induktív méretellenőrző elrendezés Vastagságmérő elrendezés Automatikai építőelemek 11. Felépítés: 1- fazékvasmag, 2- állítható mérő kocsi, 3- mozgó érintkező görgő 4- mérőhíd, 5- műszer, 6- nullapont beállító potenciométer, 9- álló görgő, 10- szalag vastagságát beállító csavar, 11- függesztő membrán, 12- függesztő vezeték, 13- mérő beállító.
Gyakori kapacitív mikrométer Kapacitív mikrométer Út (távolság) mérése Kapacitív mérőátalakító Kevésbé használják, mert magasabb frekvenciájú tápfeszültség alkalmazása szükséges. A jobb oldali ábra mutat példát egy kapacitív elven működő mikrométerre. Az érzékelő elem egy hengeres felépítésű differenciálkondenzátor. Jelölések: 1- a kondenzátor álló fegyverzete, 2- mozgó fegyverzet, 3-különbségképző, és erősítő. Gyakran alkalmazott megoldást mutat a bal oldali ábra. Jelölései a következők: 1- rögzítő rugó, 2- acélház, 3- elektróda tartó, 4- polisztirol szigetelő, 5- tányérrugó, 6- polisztirol szigetelés, 7- rögzítő anyák, 8- polisztirol szigetelés, 9-elektróda fegyverzet. Automatikai építőelemek 11.
14.12. ábra. Örvényáramú módszer Örvényáramú módszer Nem mágneses fémekből készült fóliák, lemezek, stb. érintkezés nélküli vastagságmérésre alkalmazható az örvényáramú módszer. Jelölések: 1- tápfeszültség generátor, 2- mérendő anyag, 3- erősítő, 4- detektor, 5- műszer. A primer tekercset az 1. jelű oszcillátor gerjeszti. A szekunder tekercsben indukált feszültség a tekercs geometriától és a mérendő vastagságú anyagban indukált feszültség hatására folyó örvényáram intenzivitásától függ. A műszert közvetlenül vastagságra hitelesítik. A mérési elv lényege, hogy a vizsgálandó lemez, a benne folyó örvényáramok miatt mágnesesen árnyékolja a transzformátor szekunder tekercsét.Az örvényáram adott indukció esetén a lemezvastagság, fajlagos ellenállás, és a relatív permeabilitás függvénye. Mivel „ρ” és „εr” állandó, ezért az örvényáram csak az anyag vastagságának függvénye. Általában Al, Cu és Zn lemezek vastagságának mérésére használják. Automatikai építőelemek 11.
Mágnesfluxusos mérés elve Mágnesfluxus módszer Ez az eljárás ferromágneses lemezek vastagságának mérésére szolgál. Fluxusváltozás mérésén alapuló módszer A fluxusváltozás a mágneskör ellenállásának függvénye. A méréshez statikus mágneses teret kell létrehozni. Korszerű hordozható műszerek készíthetők el ezen elv alapján. A 2 állandó mágnest az 1 lágyvas járommal E alakú vasmaggá képezik ki. Az állandó mágnesre helyezik a 4 tekercset, amely a mágneskör fluxusának változásait érzékeli, amelyet az 5 műszer mér. Működése a következő: a 3 mérendő ferromágneses lemezre helyezzük az egész mérő átalakítót (magot). A mágneses ellenállás megváltozása miatt annak mértékében megváltozik az állandó mágnes fluxusa, tehát az 5 fluxusmérő forgórésze elfordul. A mágneses ellenállás a lemezvastagság függvénye, ettől függ tehát a „Φ” nagysága. Vaslemeztáblák, acélöntvények vizsgálatára szolgál.Bizonytalansága 4mm lemezvastagságig kb. 1%. Ha a mérőtekercs helyett a „Φ”-t Hall generátorral érzékeljük, akkor a mérési tartomány 14 mm-ig is kiterjeszthető. Automatikai építőelemek 11.
Ultrahangos vastagságmérés elve Ultrahangos vastagságmérés 1 mérendő darabon rá van szorítva a 2 kvarc, amely kapcsolódik az oszcillátorhoz, amelynek változtatható a frekvenciája (0,2…0,5MHz). A frekvenciát addig változtatjuk, amíg a vizsgált anyag olyan rezgőrendszerré nem válik, amelynek rezonancia frekvenciája éppen a beállított oszcillátor frekvenciája felének páratlan számú többszöröse. Automatikai építőelemek 11. ahol: „d” - vizsgált anyag vastagsága, „n” – felharmonikus rendszáma, „fn” - n-ik felharmonikus rezonancia frekvenciája, „v” - hang terjedési sebessége az anyagban. A pontatlanság kb 1% 1…30mm vastagság között.
Ellenállásos átalakító Mérőérintkező kivitelezése Mérőérintkező elve Csúszóérintkezős ellenállásos átalakítók Automatikai építőelemek 11. Kis értékű lineáris elmozdulás – pl. belső átmérő – mérésére szolgál az ábra. Jelölései: 1- karáttétel, 2- tapogatófejek, 3- csúszóellenállás. Csúszóérintkezős ellenállásokat kis értékek mérésére ritkán alkalmazzák.
Merülőmagos mérés Kapacitív mérés Nagy elmozdulások mérése Induktív eljárás Induktív eljárások esetén a már korábban tanult merülővasmagos tekercsek használatosak. A felső eszköz a mozgó (mérendő) objektumhoz csavarokkal rögzíthető, az alsó eszköz pedig tapintós felépítésű. A tapintó (nyomó) erőről rugó gondoskodik. A tárgyalt induktív átalakítók alsó mérési határa 0,5…1mm, a felső pedig 150…200mm Automatikai építőelemek 11. Kapacitív eljárás Kapacitív mérési eljárásokkal a már korábban tanult dielektrikus megoldást alkalmazzák. Egy ilyen átalakító felépítését mutatja az ábra. Jelölései a következők: 1- csatlakozó, 2-átvezető, 3- polisztirol szigetelő, 4- belső elektróda, 5- külső elektróda,
14.23. ábra. Elmozdulás mérése impulzusszám alapján Elmozdulás mérése impulzusszám alapján Impulzusok közvetlen számlálásával Automatikai építőelemek 11. Az impulzusszám alapján történő mérés úgy valósítható meg legegyszerűbben, ha a mérendő tárgy haladási útvonalán elhelyezett jeladók impulzusait számoljuk. Erre mutat példát az ábra melyen a közvetlen számlálással történő hosszúságmérés látható. A mérés kezdeti időpillanatát a tárgy elől haladó homlok élének FD1 jeladó látótérbe kerülése jelenti. A mérés pontossága a jeladók közötti távolságtól és az optikai rendszer nagyításától függ. Ennek az abszolút mérési módszernek a hátránya, hogy a pontosság növelése a jeladók számának növelését igényli. Ez bonyolulttá, és költségessé teszi a rendszert, továbbá csökkenti a megbízhatóságot.
14.23. ábra. Elmozdulás mérése impulzusszám alapján Elmozdulás mérése impulzusszám alapján Közvetett hosszúságmérési módszer Automatikai építőelemek 11. Korszerűbb megoldás az alsó ábra szerint relatív mérési módszer, amely az előforduló legkisebb mérés túllépése alapján határozza meg az elmozdulást (hosszúságot). A számlálás pillanata akkor kezdődik, mikor a tárgy hátsó éle az FD1 jeladó tengelyvonalát metszi (sötétre kapcsoló áramkör). A megvilágított fényérzékelők N szá-mától függ a legkisebb mérés Δl túllépése. Megvilágított az az érzékelő, amelynek látóterében megtalálható a mérendő tárgy. A teljes hosszúság:ahol: „k”- a fényérzékelők közötti távolság, osztótávolság „n”- darabszám A jeladók lehetnek fényelektromos, rádióizotópos és egyéb elven működő eszközök. L=Lmin+k·n,
Hosszúságmérés időmérés alapján Hosszúságmérés időmérés alapján Automatikai építőelemek 11. A hosszúság meghatározható az idő és sebesség szorzataként. Ennél a mérésnél az idő alatt azt az időintervallumot értjük, amely a tárgy elülső és hátsó élei által a fényérzékelőkben generált jelek között mérhető. A pontosság növelése miatt nem célszerű a teljes hosszúság, hanem csak egy, a teljes méretet meghaladó minimális rész mérése. Erre mutat példát a bal oldali ábra. A Δl = L-Lmin méretet kell meghatározni. A tárgy „v” mozgási sebessége állandó. Ekkor: Δl=υ·Δt ahol Δt a két időpont különbsége. (FD1 jeladó tengelyének a metszéspontja, a tárgy elülső éle által és az FD2 jeladó tengelyének metszéspontja a hátsó él által). Ez a módszer csak állandó mozgási sebesség mellett használható.
Hosszúságmérés időmérés alapján Hosszúságmérés időosztás alapján Vizsgáljuk meg a jobb oldali ábrát. Különböző méretű és profilú anyagok egymástól eltérő sebességgel mozoghatnak, így az előbbi módszer szerint jelentős hiba keletkezne. A pontosságot akkor a 3 jelű jeladóval lehet növelni. Az Lmin méret feletti Δl méret a következő kifejezéssel határozható meg: Automatikai építőelemek 11. ahol: „tΔl” - a tárgy elülső élének, és az FD1 jeladó tengelyvonalának metszés-pontjai közötti időkülönbség, „tΔL”- a tárgy elülső élének, és az FD1 továbbá FD3 jeladó tengelyvonalának metszési időpontjai közötti időkülönbség.Ha a ΔL szakaszon a tárgy mozgási sebessége állandó, akkor:
Automatikai építőelemek 11. Köszönöm a figyelmet!