Download
1 / 13
130 likes | 208 Views
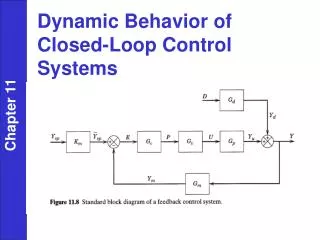
Dynamic Behavior of Slowly-Responsive Congestion Control Algorithms. Deepak Bansal, Hari BalaKrishna, Sally Floyd and Scott Shenker. Presented By : Dinu (P. Subbaiah). Congestion Control in TCP. AIMD- Additive Increase and Multiplicative Decrease

E N D
Dynamic Behavior of Slowly-Responsive Congestion Control Algorithms Deepak Bansal, Hari BalaKrishna, Sally Floyd and Scott Shenker Presented By : Dinu (P. Subbaiah) CPSC 538A
Congestion Control in TCP • AIMD- Additive Increase and Multiplicative Decrease 1% packet loss rate may cause 50-75% decrease in throughput. CPSC 538A
TCP Compatible Paradigm for congestion control • Characteristics of TCP • Roughly equal bandwidth for similarly situated (same RTT) flows with same packet size • Bandwidth is proportional to 1/sqrt(p), p is packet loss rate • Compatibility • Another protocol should have the same characteristics, in the presence of a constant loss rate CPSC 538A
TCP Compatible Algorithms CPSC 538A
Binomial • Binomial algorithms – nonlinear generalization of AIMD Upon congestion : W->W-b(W^l) no congestion : W->W+a/(w^k) • IIAD: Inverse Increase-Additive Decrease(k = 1, l = 0) • SQRT : (k = l = 0.5) a and b are increase and decrease parameters of the algorithm. CPSC 538A
Emulate TCP window adjustment Report rate R. Receiver TEAR: TCP Emulation At Receivers • Instead of reporting congestion signals, process them immediately at receivers. The sender sets its transmission rate to R Sender www.csc.ncsu.edu CPSC 538A
TFRC: TCP Friendly Rate Control • The receiver measures the loss event rate and feeds this information back to the sender. • The sender also uses these feedback messages to measure the RTT. • The loss event rate and RTT are then fed into TFRC's throughput equation, giving the acceptable transmit rate. • The sender then adjusts its transmit rate to match the calculated rate. www.zvon.org CPSC 538A
Dynamic Scenario • The congestion Control algorithms are defined and tested in a static scenario. • This paper tests the behavior of slow responsive algorithms in a dynamic environment by changing the bottleneck bandwidth. • The goal is to evaluate any potential dangers in the deployment of slowCC. CPSC 538A
Tests and Results • Abrupt reduction in available bandwidth. High packet loss rates can be reduced by packet conservation CPSC 538A
Tests and Results • Long Term Fairness. • Note the relative fairness between TCP and TFRC CPSC 538A
Tests and Results • Loss in throughput with sudden increase in Bandwidth f(k) is average link utilization where k is number of RTTs. Tested for bandwidth of 10 Mbps and a RTT of 50 ms. CPSC 538A
Tests and Results • Smoothness in bursty loss patterns. TFRC Smoothness: Largest ratio between two consecutive sending rates CPSC 538A
Conclusion • Safe for deployment • SlowCC mechanisms lose bandwidth, relative to TCP in dynamic environments. • SlowCC mechanisms (TFRC) achieve smooth data rates even in bursty loss rates. • Significant contribution • Incorporating a Self Clocking mechanism based on packet preservation in slowCC algorithms prevent overload or persistent loss rates. CPSC 538A