Download
1 / 19
230 likes | 598 Views
Particle Filter. Contents. Brief Introduction Concept on Particle Filter Details about errors. Uses. Track a variable of interest in the system Example in the paper: localization Noise, Variable : Position. Characteristic. Monte Carlo Method Not restricted to Kinematics

E N D
Contents • Brief Introduction • Concept on Particle Filter • Details about errors
Uses • Track a variable of interest in the system • Example in the paper: localization • Noise, • Variable: Position
Characteristic • Monte Carlo Method • Not restricted to Kinematics • The gist: filter particles by feedback evaluation
Example System • Movable robot Rotation Translation
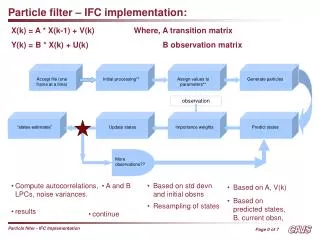
Particle Filter Method • Prediction Phase • Update Phase • Prerequisites: Particles Particles Sample
Prediction Phase • Take an actually move (interval) New Pose
Forward change to all Particles • Apply the change to all particles Error
Update Phase • To update the weights of all particles • Measurement
Update Phase • Measurement
Update Phase • Compute Measurement of Each particle • Use the measurement to decide weight
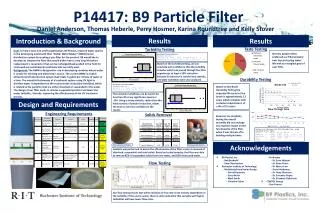
Resampling • Eliminate particles with minor weights • Keep and propagate the particles with large weights • The significance of keep copies of large weight particles:
Select with Replacement • Object: eliminate minor weight particles, but leave large ones • 1. Compute cumulative sum: • Sample N random numbers and sort them: • If Ti < Qj, then choose particle j, otherwise drop particle j • If particle J is chosen, then i++, if Ti+1 still < Qj then chose particle J another time and likewise.
Prediction Error: Rotation • Sway a little bit when rotate The more the robot rotates the more deviation the error would be
Prediction Error: Translation • May not follow a rigorous straight line • Choppy • Periodical emulation
Prediction Error: Translation : Length of each sub segment
The end Thank you!