Download

1 / 17
170 likes | 322 Views
Team Kinect. Final presentation. What is Kinect ?. Microsoft gaming console accesoire for Xbox 360 Human interface device with gestures For Xbox 360 since September 2010 For Windows since February 2012. Motivation. Interest in HCI and alternative input devices

E N D
Team Kinect Finalpresentation
WhatisKinect? Microsoft gaming console accesoire for Xbox 360 Human interface device with gestures For Xbox 360 since September 2010 For Windows since February 2012
Motivation • Interest in HCI and alternative input devices • Expand functionality of (consumer) hardware • “Trendy” topic • Versatile application areas • Entertainment • Education • Security • Medicine
Existing Projects • Application specific projects : • MIT: Google Chrome • KinEmote: Controlling home theater software • Use in sterile environment like a hospital
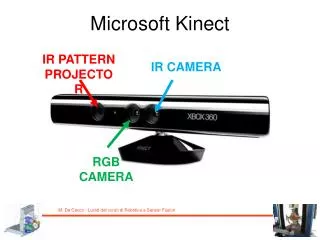
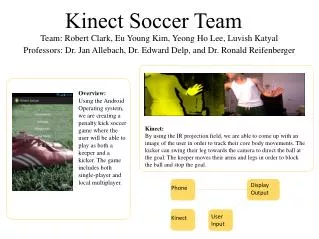
Technical background • 3 important components: • Infrared laser projector • RGB Camera • Depth sensor (monochrome camera with IR-pass-through filter) • Not used (by us): • Microphone array
Our project – “KinectCut” Name: Kinectusing shortCuts Application independent Kinect control Using Java and OpenNI and PrimeSense Java Robot-Class
Approach Stock gesture recognition isn’t appropriate enough for our approach Measuring the angles and length of the arms Velocity and position of several body parts
Interaction Model • Problem to differ between gestures and actions • Solution: mode arm & action arm • Mode arm (left): switch between states • Action arm (right): propose the action while in state
From Body to Command • Discretizing angles to recognize gestures • Smoothing filter for mouse coordinates to screen mapping
Architecture Control Robot Actions 1110100001 StateMachine OpenNI&PrimeSense BodyParser(discretization) Body (Skeleton)/ Raw Data Gestures/Skeleton
Feedback • No tengible feedback provided by Kinect • Different Types of feedback: • Mode displayed • Calibration state • Hand-recognition state • History of actions and state changes • Wireframe model
Experience on project Working in an interdisciplinary, multicultural and multilanguage team Finding ideas that can be completed in the given time with the given team
Experience on Summer Camp • océ is not only doing paper printing :-) • Real-life experience on project work • New Environment • New Task • New Team • Excellent organization of SummerCamp • Social Events • Accommodation • Supervision
In the end, it was FUN! Thank you océ!