Download
1 / 14
140 likes | 328 Views
STOCHASTIC FINITE ELEMENTS IN A COMPLEX SYSTEM: VIBRATING NON STATIONARY FLUID FLOW, MASS TRANSPORT, HEAT CONDUCTION. Skender Osmani , Margarita Qirko Polytechnic University ,Tirana, ALBANIA E-mail s_osmani@yahoo.com. Abstract.

E N D
STOCHASTIC FINITE ELEMENTS IN A COMPLEX SYSTEM: VIBRATINGNON STATIONARY FLUID FLOW, MASS TRANSPORT, HEAT CONDUCTION. Skender Osmani, Margarita Qirko Polytechnic University ,Tirana, ALBANIA E-mail s_osmani@yahoo.com
Abstract • The paper presents a view on applications of stochastic finite elements (S.F.E.) R3 in one complex system, considering a differential equation with random parameters, • where, • x, y, z are the 3D spatial coordinates,. t- the processes time • is a process function( temperature, pressure etc) • Kij- the conductivity tensor.In general case it is: • ( 12) d- capacity coefficient (function),g- mass coefficient (function),Q- density of the volume flux, V –velocity vector.
This equation in specific conditions goes to: • - non stationary fluid flow in porous medium (or / and) , • - mass transport (or /and) • - heat transfer (or/and) • - vibrating system etc. • The paper contains: • 1-An approach of the mean value estimation of the parameter distributions, using S.F.E.. • The next is defined as a block vi, with the random function Z(x), where xvi. is a random variable i.e. the value at point x determines the respective probability distribution p(x) .After the estimation of the mean value over the domain vi , is calculated by • zvi = (1) • 2.-Development of the numerical model using S.F.E . applying a mixed algorithm at the , i.e. it is applied . the Galerkin,s approach not “as a whole” as it is often happened in the literature[3][15] , but partly , combining it with other numerical procedure as Runge-Kutta of the fourth order etc. • In this treatment, the initial and boundary conditions have been supposed to be treated specifically according by the given problem. • 3.- Several simple examples as particular case of the mentioned equation. • 4.Conclusions, the good things of the S.F.E in stationary flow, mass transport, heat transfer, vibrating , subsidence, waving, deformations, consolidations, earthquakes and other phenomenon’s.
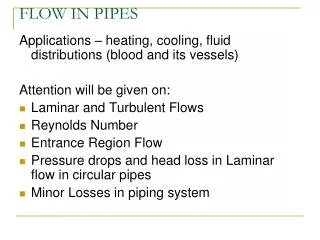
2. Stochastic Finite Element • 2.1 Mean value estimation • Let’s consider: a zone V R3 and a random function Z(x) , xV; the zone V is partitioned into blocks vi by a parallelepiped grid : • V= vi (2) • where vi is a parallelepiped element with eight nodes. In each node Z(x) is known i.e the probability density on its point support as it is shown in Fig(1) . • Fig. 1. Parallelpiped element. • Let, suppose ,it is required 8: • -the distribution p.d.f in whatever point xV • -the estimation of the mean value • zvi = 1/vi Z(x)dx (3) • over the domain vi . • The stochastic finite element is defined as a block vi, with the random function Z(x), where xvi. is a random variable i.e. the value at point x determines the respective probability distribution p(x). • Let us consider a reference element wi in the coordinate system s1 s2 s32. If we choose an incomplete base: • P(s)=1 s1 s2 s3 s1s2 s2s3 s3s1 s1s2s3 (4)
Therefore • Zvi= Z(x1(s1 s2 s3 ), x2(s1 s2 s3 ), x3(s1 s2 s3 )) det J ds1 ds2 ds3= • < N (s) >{ Zs8 } det J ds1ds2ds3 = HiZi(x) (7) • where J is the Jacobian of the transformation , Hi are the distribution weights depending only on the node coordinates and in other words they make the weighted average of the given distributions at the nodes. Furthermore, if we consider the expectation: • E{Zv(x)}=E(1/vi (HiZi(x) dx (8) • under the hypothesis: • E (Zi(x) )= mi m = const , I = 1,8 (9) • then • E{ Zv(x)}= Hi E(Zi(x)) = Him =m , i=1,8 (10) • Thus,the stochastic estimator of chose finite element is a linear interpolator, related to the distributions given at its nodes.
Fig 2 Node density distributionFig 3 Node cumulative function • Fig 4 Mean value density Fig 5 Mean value cumulative distribution function
2.2 Numerical model • Let’s briefly consider some differential equations [12] in a zone R3 • 1-Heat equation Q (11) where, • x, y, z are the 3D spatial coordinates. • T-the temperature function: T = T(x, y, y, z, t) • t- the processes time, d- capacity coefficient (function), g- mass coefficient (function), Q- density of the volume flux
2-Solute transport equation c- concentration in the liquid phase as mass of contaminant per unit volume of solution Dx, Dy, Dz, - directional hydrodynamic dispersion coefficient.,R- retardation factor depending on other factors [15][16], k- the overall first order decay rate,Vx, Vy, Vz, -directional (seepage) velocity components 3.Vibrating (system) equation: (14) m-mass of the system, d-damping coefficient (function), k-elasticity coefficient (function), f-external force[14] As the applied SFE mechanism is analogues to above equations, below we are considering another equation in a given zone R3
According to the Galerkin’s approach we have: • So in these circumstances the velocities, Vx, Vy, Vz will be considered known. Being so, further we will again simplify the idea, considering only the differential equations system. (31) then (36) Basing on the mentioned algorithm with three dimension SFE it is compiled a C++ code for the general equation(15).
3.Illustrative examples 3.1.Vibrating system: • In one SFE structure are considered only two nodes of a vibrating system[13][14] , characterized of the following differential equations: d2u/dx2 - 3du/dx + 4u = 6sin(2t) d2v/dx2 - 3dv/dx + 2v = exp(2t)*sin(t) (37) • The solution is asked at the process time t[0, 1].In order to obtain it, we take into account the Runge Kutta approach and transform the system as bellow: • du1/dt = u2 = f1(t, u1, u2,u3, u4) (39) • du2/dt = 6sin(2t)+3u2-4u1 = f2(t,u1,u2,u3, u4) • du3/dt = u4 = f3(t, u1, u2,u3, u4) • du2/dt = exp(2t)*sin(t)+2u4-2u3= f4(t, u1, u2, u3, u4)
For different time : t=0.1, 0.2, 0.3, 0.4, 0.5 • (dividing the given segment into elementary ones with n=4000),are obtained the following results: • U[0.1]=0.9801 U[0.2]= 0.9212 U[0.3]= 0.8256 U[0.4]= 0.6971 U[0.5]= 0.5408 • V[0.1]=-0.4617 V[0.2]=-0.5256 V[0.3]=-0.5886 V[0.4]=-0.6466 V[0.5]=-0.6936 • Taking into account the exact solution of the given system: • u=cos(2*t); • v=0.2(exp(2t)*(sin(t)-2*cos(t)) • the calculation error of the solution results generally smaller than 0.0001.
3.2.Non stationary heat transfer: • As a application of heat transfer let’s consider the plane problem : cp*(d2U/dx2+k*d2U/dy2)+cd*dU/dt +cg*d2U/dt2 = Q(x,y,t) (39 ) cp=1,cd=1,cg=1; • in one SFE face in which three nodes having their coordinates as: 1 x=0,y=1; 2 x=0,y=0; 3. x=1,y=0 (39.1) • t=10 • U1[1]=-29.000001 U2[1]=-3 • U1[2]=-28.866354 U2[2]=-3.0382929 • U1[3]=-29.000001 U2[3]=-3 • The exact solution of this problem is: U=x2 + y2 - 3*t. • Comparing theoretical results to those obtained , the error of heat transfer gets to be smaller for t >10.
3.3 Heat general equation • Now, in one reference [ ] SFE , let’s consider the general equation of the heat transfer : cp1*d2u/dx2 + cp2*d2u/dy2+cp3*d2u/dz2 + cg*d2u/dt2+cd*du/dt = Q(x,y,z,t) cp1= cp2= cp3 = cd = cg = 1; t=0.30 • U1[1]=2.2224547 U2[1]=-2.2224547 • U1[2]=2.2224547 U2[2]=-2.2224547 • U1[3]=2.2224547 U2[3]=-2.2224547 etc. • The exact solution of the above differential equation is U=(x2+y2+z2)exp(-t), so the solution has a spheric symmetry .This fact is accomplished only for t=0.1 , while for t=0.3 that is not.
4. Conclusions • The study of complex phenomenon’s could be done using SFE. Their applications are essential in the geodynamics, energy[8] and water resources, reservoir engineering( exploration, exploitation, oil, gas water flow[6], well testing[1] ) , hydrology, environment, geostatistics, risk analysis[11] etc • SFE algorithm could be used not only in the solution of the mentioned equations ,but also in geostatistics (Kriking estimation),plane and space stress, bending etc [12],in the local estimation of different proprieties, solving the inverse local problems etc .The geostatistics methods could be simultaneously used with other dynamic ones for parameter estimation , reserve calculation[7] [9] etc - SFE could be coded using Object – Oriented Languages as C++[5], independently of (excessive) data, complex and difficulties programs, which in the future will need to be modified , extended etc as it was the case analyzed etc. • In the view of resources management [10], the SFE approach could and should be used as an important strategy in the exploration, exploitation, using , monitoring, reserve estimation, optimal placement and location etc of energy, oil, water etc. resources in different engineering projects, shortly say to determine and decide of optimally economical solution, the best of the contingency alternatives .