Download

1 / 65
0 likes | 24 Views
Prof Charlton Lagrangian dynamics used in robotics

E N D
ROBOT DYNAMICS DYNAMIC ANALYSIS AND FORCES Prof. Charlton S. Inao Defence University DebreZeit , Ethiopia
Introduction • Analysis of forces, torques, inertias, loads, and accelerations. • Derivation of dynamic equations of motion. • Allows determination of important loads for design. • Assists in the selection of actuators.
Newtonian Mechanics • Easier for simpler systems. • Familiar to users
Lagrangian Mechanics • Easier for more complicated systems • Based on system’s energies • Systematic • Lagrangian is the difference between kinetic and potential energies of the system:
Lagrangian Relationships • Lagrangian relationships are:
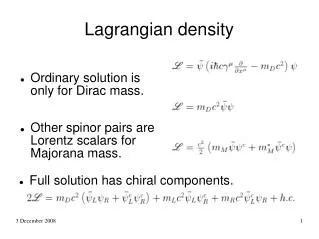
Review of Basics • Potential energy is energy stored in an object due to its position or arrangement. • Kinetic energy is energy of an object due to its movement - its motion
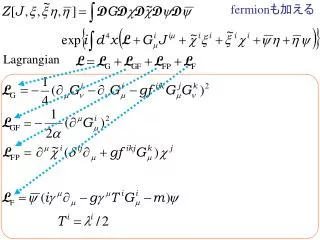
Lagrangian Mechanics • Lagrangian field theory is a formalism in classical field theory. It is the field-theoretic analogue of Lagrangian mechanics • Lagrangian mechanics is used for discrete particles each with a finite number of degrees of freedom. Lagrangian field theory applies to continua and fields, which have an infinite number of degrees of freedom. • Deals with energy.. The difference between Kinetic and Potential energy.
In this chapter, we’re going to learn about a whole new way of looking at things. • Consider the system of a mass on the end of a spring. We can analyze this, of course, by using F = ma to write downmm¨x =−kx. • The solutions to this equation are sinusoidal functions, as we well know. • We can, however, figure things out by using another method which doesn’t explicitly use • F = ma. • In many (in fact, probably most) physical situations, this new method is far superior to using F = ma.
Lagrangian mechanics • Please see examples in the book for the application of Lagrangian mechanics. For the following system we can derive equations of motion as:
Kinematics Solution W=angular velocity of the wheel 2r=diameter X dot= linear velocity
Notes: velocity distance
Example 2 Newtonian mechanics VS Lagrangian mechanics
Solution a) Lagrangian Mechanics
b) PE=PE spring + PE pendulum Pendulum Spring
Taking the derivatives of the Langrangian and substituting into Equation 4.4 yields to the ffg. Equation of Motion
Equation of motion in Matrix Form Solution # 4 cont’d…..
DETAILED SOLUTION No. 5 Solve for Kinetic Energy for each link Solve for K1
Reference: Moment of InertiaThin rod about axis through end perpendicular to length
Solve for the X and Y component of M2 Horizontal component up to point m2 vertical component up to point m2
Differentiate XD and YD to get the velocity and the velocity of the arm distance up to point m2 U= r V=cosθ U V Recall
Calculate the VD ,up to Mass2and square it, for linear an d angular component of momentum expression, V2D