Download
1 / 42
440 likes | 723 Views
Bilateral Mesh Denoising. Shachar Fleishman Iddo Drori Daniel Cohen-Or Tel Aviv University. Denoising. Input (scanned) model Additive noise. +. =. filter. +. =. Denoising. Input (scanned) model Additive noise Noise free model Preserve features. Image denoising.

E N D
Bilateral Mesh Denoising Shachar FleishmanIddo DroriDaniel Cohen-Or Tel Aviv University
Denoising • Input (scanned) model • Additive noise + =
filter + = Denoising • Input (scanned) model • Additive noise • Noise free model • Preserve features
Image denoising • Wavelet denoising [Donoho ’95] • Anisotropic diffusion [Perona & Malik ’90] • Bilateral filter [Smith & Brady ’97], [Tomasi & Manduchi ’98] • [Black et al. ’98] • Anisotropic diffusion • Robust statistics • [Elad ’01], [Durand & Dorsey ’02] relate • Anisotropic diffusion • Robust statistics • Bilateral filter
Original and noisy ( 2=900) images Images courtesy of Michael Elad
TV filtering: 50 iterations 10 iterations (MSE=146.3339) (MSE=131.5013) Images courtesy of Michael Elad
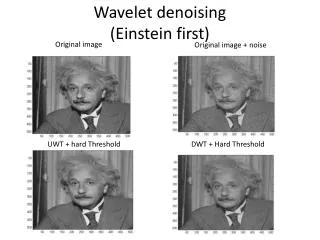
Wavelet Denoising (soft) Using DB5 Using DB3 (MSE=144.7436) (MSE=150.7006) Images courtesy of Michael Elad
Filtering via the Bilateral 2 iterations with 1111 Sub-gradient based 55 (MSE=89.2516) (MSE=93.4024) Images courtesy of Michael Elad
Mesh denoising, smoothing and fairing • Adapt image denoising algorithms to meshes • Wiener filter [Peng et al. ’01] • Isotropic diffusion [Desbrun et al. ’99] • Anisotropic diffusion of height fields [Desbrun et al. ’00] • Anisotropic diffusion on meshes [Clarenz et al. ’00, Xu & Bajaj ’03] • Bilateral filter [Choudhury & Tumblin ’03] [Jones et al. ’03]
Bilateral mesh denoising • Fast • Simple • Intuitive parameter selection
* = Bilateral filtering • Gaussian filter
* = Bilateral filtering Denoise Feature preserving • Bilateral filter Normalization
Bilateral filtering of meshes • Height above surface is equivalent to the gray level values in images
Bilateral filtering of meshes • Height above surface is equivalent to the gray level values in images • Apply the bilateral filter to heights
Bilateral filtering of meshes • Height above surface is equivalent to the gray level values in images • Apply the bilateral filter to heights • Move the vertex to its new height
Bilateral filtering of meshes • Height above surface is equivalent to the gray level values in images • Apply the bilateral filter to heights • Move the vertex to its new height • In practice: • Sharp features
Bilateral filtering of meshes • Height above surface is equivalent to the gray level values in images • Apply the bilateral filter to heights • Move the vertex to its new height • In practice: • Sharp features • The noise-freesurface is unknown
n P L Solution • A plane that passes through the point is the estimator to the smooth surface • Plane L=(p,n)
n P L Similarity closeness Solution • A plane that passes through the point is the estimator to the smooth surface • Plane L=(p,n)
Computing the plane • The approximating plane should be: • A good approximation to the surface • Preserve features • Average of the normal to faces in the 1-ring neighborhood
DenoisePoint(Vertex v, Normal n) {qi} = neighborhood(v) K=|{qi}| sum=0 normalizer=0 for i := 1 to K t = ||v-qi|| h = <n,v-qi> Wc=exp(-t2/(2σc2)) Ws=exp(-h2/(2σs2)) Sum +=(wc*ws)h Normalizer += wc*ws End Return v+n*(sum/normalizer) v
DenoisePoint(Vertex v, Normal n) {qi} = neighborhood(v) K=|{qi}| sum=0 normalizer=0 for i := 1 to K t = ||v-qi|| h = <n,v-qi> Wc=exp(-t2/(2σc2)) Ws=exp(-h2/(2σs2)) Sum +=(wc*ws)h Normalizer += wc*ws End Return v+n*(sum/normalizer) iterate over neighborhood v
DenoisePoint(Vertex v, Normal n) {qi} = neighborhood(v) K=|{qi}| sum=0 normalizer=0 for i := 1 to K t = ||v-qi|| h = <n,v-qi> Wc=exp(-t2/(2σc2)) Ws=exp(-h2/(2σs2)) Sum +=(wc*ws)h Normalizer += wc*ws End Return v+n*(sum/normalizer) closeness v q
DenoisePoint(Vertex v, Normal n) {qi} = neighborhood(v) K=|{qi}| sum=0 normalizer=0 for i := 1 to K t = ||v-qi|| h = <n,v-qi> Wc=exp(-t2/(2σc2)) Ws=exp(-h2/(2σs2)) Sum +=(wc*ws)h Normalizer += wc*ws End Return v+n*(sum/normalizer) height – similarity v q
DenoisePoint(Vertex v, Normal n) {qi} = neighborhood(v) K=|{qi}| sum=0 normalizer=0 for i := 1 to K t = ||v-qi|| h = <n,v-qi> Wc=exp(-t2/(2σc2)) Ws=exp(-h2/(2σs2)) Sum +=(wc*ws)h Normalizer += wc*ws End Return v+n*(sum/normalizer) v weights
DenoisePoint(Vertex v, Normal n) {qi} = neighborhood(v) K=|{qi}| sum=0 normalizer=0 for i := 1 to K t = ||v-qi|| h = <n,v-qi> Wc=exp(-t2/(2σc2)) Ws=exp(-h2/(2σs2)) Sum +=(wc*ws)h Normalizer += wc*ws End Return v+n*(sum/normalizer) v Move the vertex in the normal direction
Parameters • The two parameters to the weight function: σc, σs • Interactively select a point p and the neighborhood radius ρ • σc =1/2 ρ • σs = stdv(Nbhd(p, ρ)) • Number of Iterations
Robustness • Sharp features are treated as outliers
Robustness • Sharp features are treated as outliers • The bilateral filter does not recover smoothed signal
Results Bilateral mesh denoising Anisotropic denoising of height fields - Desburn ’00 Source
Results Anisotropic Geometric Diffusion in Surface Processing - Clarenz ‘00 Bilateral mesh denoising Source
Results Two iterations Five iterations Source
Future Work • Adapt the algorithm to point sets • Robust estimator of normals
Acknowledgements • Models and images courtesy of Jean-Yves Bouguet, Mathieu Desbrun, Alexander Belyaev, Christian Rossl from Max Planck Insitut fur Informatik, Udo Diewald and Michael Elad • Israel Science Foundation funded by the Israel Academy of Sciences and Humanities • Israeli Ministry of Science • A grant from the German Israel Foundation (GIF).
Input Bilateral mesh denoising Non-iterative, Feature Preserving Mesh smoothing
Bilateral mesh denoising Non-iterative, Feature Preserving Mesh smoothing Source
Bilateral mesh denoising Non-iterative, Feature Preserving Mesh smoothing
Comparison - predictors Bilateral mesh denoising Non-iterative, Feature Preserving Mesh smoothing
New results Bilateral mesh denoising Extended Bilateral mesh denoising