Download
1 / 55
590 likes | 1.01k Views
Multidisciplinary Design Optimisation of Unmanned Aerial Vehicles (UAV) using Multi-Criteria Evolutionary Algorithms. L. F. Gonz á lez , E. J. Whitney, K. Srinivas, K.C Wong The University of Sydney, Australia. J. Périaux

E N D
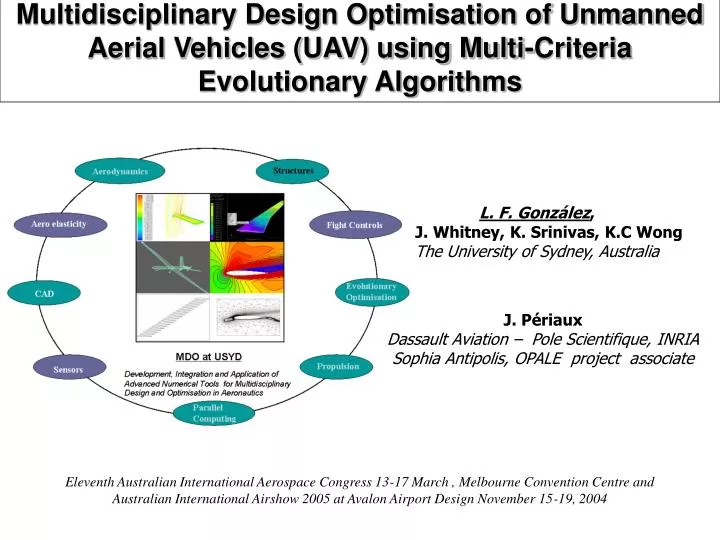
Multidisciplinary Design Optimisation of Unmanned Aerial Vehicles (UAV) using Multi-Criteria Evolutionary Algorithms L. F. González, E. J. Whitney, K. Srinivas, K.C Wong The University of Sydney, Australia J. Périaux Dassault Aviation – Pole Scientifique, INRIA Sophia Antipolis, OPALE project associate Eleventh Australian International Aerospace Congress 13-17 March , Melbourne Convention Centre and Australian International Airshow 2005 at Avalon Airport Design November 15-19, 2004
OUTLINE OUTLINE • Introduction • Unmanned Aerial Vehicle (UAV/UCAV) Design Requirements • The need and requirements for a Multidisciplinary Design Optimsation Framework in Aeronautics • Theory • Evolution Algorithms (EAs). • Multidisciplinary –Multi-objective Design • Hierarchical Asynchronous Evolutionary Algorithm (HAPEA). • Applications: UAV Design • Conclusions
UAVDESIGN REQUIREMENTS • Use and development of UAV for military and civilian applications is rapidly increasing. • Similar to the manned aircraft the challenge is to develop trade-off studies of optimal configurations to produce a high performance aircraft that satisfy the mission requirements. • UAV systems are ever increasingly becoming important topics for aerospace research and industrial institutions. • There are difficulties in these new concepts because of the compromising nature of the missions to be performed, like high-- or medium--altitude surveillance, combat environments (UCAV) and many others. Complex –trade-offs High Performance Multi-missions high–medium--altitude surveillance
Aerodynamics Structures Aerodynamic Performance Fight Controls Aero elasticity Takeoff weight Purchase Price Aero acoustics Sensors Propulsion MDO Complex Task - UAV -Example Minimise-Maximise Multiple Goals Multiple Disciplines Pareto optimal Surface of UAV, μUAV Optimization-Optimal Solution(S)
WHY A FRAMEWORK FOR MDO? • A software system to integrate and evaluate different complexities of MDO is required Optimisation Multiple Disciplines Search Space – Large Multimodal Non-Convex Discontinuous Multi-objective, trade-off in-house/ commercial solvers-inaccessible –modification Post-Processing Visualization tools Parallel Computing
REQUIREMENTS FOR A MO-MDO FRAMEWORK • Robust Optimisation methods (Global solutions, handle noise, complex functions, ease of integration of legacy codes CFD-FEA- black-boxes). • Problem formulation and execution (Automatic movement of data, parallel Processing heterogeneous computers). • Architectural design and information access (GUI, object oriented, no-overhead on optimization, easily extended, database-management, post-processing, visualization capabilities, fault –tolerance mechanisms) Data Data GUI
MDO FRAMEWORK Analysis Modules GUI Aerofoil Design MSES, XFOIL NSC2ke Wing Design FLO22 CalculiX Optimisation Gradient Based Optimiser EA Optimiser Nozzle Design HDASS Aircraft Design FLOPS , ADA Mesh generator Propeller Design … Mathematical Test Functions Parallel Computing MPI PVM Design of Experiments Post-Processor RSM Kriging
Evolution Crossover Mutation Fittest ROBUST AND EFFICIENT OPTIMISATION TOOLS Traditional Gradient Based methods for MDO might fail if search space is: • Large • Multimodal • Non-Convex • Many Local Optimum • Discontinuous Advanced Optimisation Tools: Evolutionary Optimisation • Good for all of the above • Easy to paralellise • Robust towards noise • Explore larger search spaces • Good for multi-objective problems
EVOLUTION ALGORITHMS What are EAs. • Based on the Darwinian theory of evolution populations of individuals evolve and reproduce by means of mutation and crossover operators and compete in a set environment for survival of the fittest. Evolution Crossover Mutation Fittest • There are many evolutionary methods and algorithms. • The complex task of MDO requires …. • A Robust and efficient evolutionary optimisation method.
DRAWBACK OF EVOLUTIONARY ALGORITHMS • Evolution process is time consuming/ high number of function evaluations are required. • A typical MDO problem relies on CFD and FEA for aerodynamic and structural analysis. • CFD/FEA Computation are time consuming • Our research addresses these issue in some detail
Our Contribution….. Hierarchical Asynchronous Parallel Evolutionary Algorithms (HAPEA) ROBUST OPTIMISATION METHODS Features of the Method: • Multi-objective Parallel Evolutionary Algorithm • Hierarchical Topology • Asynchronous Approach
MULTI-OBJECTIVE OPTIMISATION (1) • Aeronautical design problems normally require a simultaneous optimisation of conflicting objectives and associated number of constraints. They occur when two or more objectives that cannot be combined rationally. For example: • Drag at two different values of lift. • Drag and thickness. • Pitching moment and maximum lift. • Best to let the designer choose after the optimisation phase.
MULTI-OBJECTIVE OPTIMISATION (2) Maximise/ Minimise Subjected to constraints • Objective functions, output (e.g. cruise efficiency). • x: vector of design variables, inputs (e.g. aircraft/wing geometry) • g(x) equality constraints and h(x) inequality constraints: (e.g. element von Mises stresses); in general these are nonlinear functions of the design variables.
PARETO OPTIMAL SET Infeasible region • A set of solutions that are non-dominated w.r.t all others points in the search space, or that they dominate every other solution in the search space except fellow members of the Pareto optimal set. F2 Feasible region • EAs work on population based solutions …can find a optimal Pareto set in a single run F1 Pareto Optimal Front Non-Dominated Dominated
HIERARCHICAL TOPOLOGY-MULTIPLE MODELS Exploitation Model 1 precise model Model 2 intermediate model Model 3 approximate model Exploration Hierarchical Topology • We use a technique that finds optimum solutions by using many different models, that greatly accelerates the optimisation process. • Interactions of the layers: solutions go up and down the layers. • Time-consuming solvers only for the most promising solutions. • Asynchronous Parallel Computing
Evolution Algorithm Evaluator ASYNCHRONOUS EVALUATION Why asynchronous?? • Methods of solutions to MO and MDO -> variable time to complete. • Time to solve non-linear PDE - > Depends upon geometry How: • Suspend the idea of generation Solution can be generated in and out of order • Processors– Can be of different speeds – Added at random – Any number of them possible
PROBLEM FORMULATION AND EXECUTION • The Method is applicable to integrated or distributed MDO analysis • Single or multi-objective problems can be analysed • EAs require no derivatives of the objective function • The coupling of the algorithm with different analysis codes is by simple function calls and input and output data files. • Different programming languages C, C++, Fortran 90, and Fortran 77. and CFD and FEA software: FLO22 FLOPS, ADA, XFOIL, MSES, CalculiX
ARCHITECTURAL DESIGN AND INFORMATION ACCESS • Design Modules • Design of Experiments • Post-processing • Parallel Computing • Optimisation Tools
DESIGN AND OPTIMISATION MODULES Wing Design Aircraft Design
RESULTS SO FAR… • The new technique is approximately three times faster than other similar EA methods. • A testbench for single and multi-objective problems has been developed and tested • We have successfully coupled the optimisation code to different compressible and incompressible CFD codes and also to some aircraft design codes CFD Aircraft Design HDASS MSES XFOIL Flight Optimisation Software (FLOPS) FLO22 Nsc2ke ADS (In house)
CURRENT AND ONGOING OPTIMISED INDUSTRIAL APLICATIONS Shock Control Bump Optimisation 2D Nozzle Inverse Optimisation Transonic Wing Design Aircraft Conceptual Design and Multidisciplinary Optimisation UAV Aerofoil Design
CURRENT AND ONGOING OPTIMISED INDUSTRIAL APLICATIONS F3 Rear Wing Aerodynamics High Lift Aircraft System Transonic aerofoil optimisation using Grid-free solvers Propeller Design AF/A-18 Flutter Model Validation
MULTIDISCIPLINARY AND MULTI-OBJECTIVE WING DESIGN OPTIMISATION
MOO OF TRANSONIC WING DESIGN FORAN UNMANNED AERIAL VEHICLE (UAV) Objective: Minimisation of wave drag and wing weight
DESIGN VARIABLES 16 Design variables on three span wise aerofoils + 9 Design variables on three span wise aerofoil section 57 design variables
CONSTRAINTS & OBJECTIVE FUNCTIONS Minimum thickness Position of Maximum thickness Fitness functions
IMPLEMENTATION Exploitation Population size = 30 Grid size 96 x 12 x 16 Grid size 72 x 9 x 12 Intermediate Population size = 30 Grid size 48 x 6 x 8 Exploration Population size = 30 Approach one : Traditional EA with single population model Computational Grid 96 x 12 x 16 Approach two : HAPEA Six machines were used in all calculations
PARETO FRONTS AFTER 2000 FUNCTION EVALUATIONS The algorithm was run five times for 2000 function evaluations and took about six hours to compute
Best for Objective One Best for Objective Two MULTIDISCIPLINARY WING DESIGN Pareto Solutions
RESULTS Aerofoil Geometries at 0, 20 and 100% semispan
UAV DESIGN AND OPTIMISATION Minimise two objectives: Operational Fuel Weight min(OFW) Endurance min (1/E) Subject to: Takeoff length < 1000 ft Alt Cruise > 40000 ft Endurance > 24 hrs With respect to: External geometry of the aircraft • Mach = 0.3 • Endurance > 24 hrs • Cruise Altitude: 40000 ft
DESIGN VARIABLES In total we have 29 design variables Aerofoil-Wing Geometry 16 Design variables for the aerofoil + 13 Configuration Design variables Wing
DESIGN VARIABLES Tail Twist Fuselage
DESIGN TOOLS Evolutionary Algorithms (HAPEA) Optimisation Aircraft design and analysis Flight Optimsation System (FLOPS) – NASA CODE A compromise on fidelity models Vortex induced drag: VLMpc Viscous drag: friction.f Aerofoil Design Xfoil Aerodynamic Analysis Structural & weight analysis Analytically by FLOPS
IMPLEMENTATION • Aircraft Design and Optimisation Module • Hierarchical Topology
PARETO OPTIMAL REGION Objective 1 optimal Compromise Objective 2 optimal
PARETO OPTIMAL CONFIGURATIONS CAD-Model and Flight Simulation
OUTCOMES (1) • The new technique facilitates the process of conceptual and preliminary MDO studies • The new technique with multiple models: Lower the computational expense dilemma in an engineering environment (three times faster) • Direct and inverse design optimisation problems have been solved for one or many objectives. • Some Multidisciplinary Design Optimisation (MDO) problems have been solved.
OUTCOMES (2) • The algorithms find traditional classical results for standard problems, as well as interesting compromise solutions. • In doing all this work, no special hardware has been required – Desktop PCs networked together have been up to the task. • No problem specific knowledge is required The method appears to be broadly applicable to different analysis codes. • Work to be done on approximate techniques and use of higher fidelity models.
Acknowledgements • Mourad Sefrioui, Dassault Aviation for fruitful discussions on Hierarchical EAs and his contribution to the optimization procedure. • Steve Armfield and Patrick Morgan at the University of Sydney for providing the cluster of computing facilities. • We would like to thank Arnie McCullers at NASA LaRC who kindly provided the FLOPS software.
Questions… Thank you for your attention
Problems in MDO (1) • Multidisciplinary design problems involve search space that are multi-modal, non-convex or discontinuous. • Traditional methods use deterministic approach and rely heavily on the use of iterative trade-off studies between conflicting requirements.
Problems in MDO • Traditional optimisation methods will fail to find the real answer in most real engineering applications, (Noise, complex functions). • The internal workings of validated in-house/ commercial solvers are essentially inaccessible from a modification point of view (they are black-boxes). • The process of MDO is complex and involves several considerations as robust optimisation tools, problem formulations, parallel computing visualization tools. A software system or “framework” is desired”
Parallelization Module Classification of our Model: • The algorithm can be classified as a hierarchical Hybrid pMOEA model [CantuPaz] uses a Master slave PMOEA but incorporate the concept of isolation and migration trough hierarchical topology binary tree structure where each level executes different MOEAs/parameters (heterogeneous) • The distribution of objective function evaluations over the salve processors is where each slake performs k objective function evaluations. Parallel Processing system characteristics: • We use a Cluster of maximum 18 PCs with Heterogeneous CPUs, RAMs , caches, memory access times , storage capabilities and communication attributes. Inter-processor communication: • Using the Parallel Virtual Machine (PVM)
Pareto Tournament Selection • The selection operator is a novel approach to determine whether an individual x is to be accepted into the main population Population Asynchronous Buffer • Create a tournament Q Tournament Q Evaluate x x If x not dominated Where B is the selection buffer.