Download
1 / 26
270 likes | 895 Views
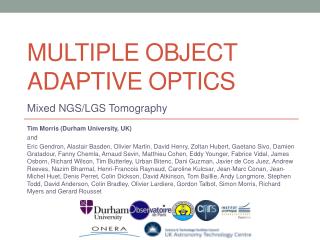
CANARY Laser Guide Star Multi-Object Adaptive Optics (LGS MOAO) E-ELT PATHFINDER ON-SKY DEMONSTRATOR FOR EAGLE. Richard Myers Durham University. Royal Astronomical Society. Overview. CANARY Collaboration LGS MOAO General EAGLE Technical challenges Principles of CANARY demonstrator

E N D
CANARYLaser Guide Star Multi-Object Adaptive Optics(LGS MOAO)E-ELT PATHFINDERON-SKYDEMONSTRATORFOR EAGLE Richard Myers Durham University Royal Astronomical Society
Overview • CANARY Collaboration • LGS MOAO • General • EAGLE • Technical challenges • Principles of CANARY demonstrator • Rayleigh LGS • Role of WHT • Demonstration stages and timescales • Risk mitigation • Current status • Funding status Why “CANARY”? Falcon: 8m MOAO (study) EAGLE: 42m MOAO CANARY: MOAO demo on 4.2m WHT on La Palma, Canary Islands RAS
CANARY Consortium Observatoire de Paris LESIA Durham University Isaac Newton Group UK Astronomy TechnologyCentre Laboratoire d’Astrophysiquede Marseille ONERA Fanny Chemla, Eric Gendron, Zoltàn Hubert, Aglaé Kellerer, Michel Marteaud, Gérard Rousset, Fabrice Vidal,Ali Basden, Sofia Dimoudi, Nigel Dipper, Colin Dunlop, Deli Geng, Andres Gueselaga, Dani Guzman, Mark Harrison, Tim Morris, Richard Myers, James Osborn, Chris Saunter, Gordon Talbot, Laura Young, Eddy Younger, Don Carlos Abrahams, René Rutten,Thierry Fusco,David Henry, Andy Longmore, Brice Leroux Overlaps with EAGLE AO design team and SESAME team RAS
Laser Guide Star Multi-Object Adaptive Optics(LGS MOAO) LGS MOAO Schematic[Courtesy ESO] RAS
EAGLE MOAO requirements and baseline implementation • NIR Multi-Integral Field Unit (IFU) for 42m E-ELT • Wide IFU patrol field ≥ 5 arcmin with ≥ 20 such IFUs • ≥ 30% energy in 0.075 arcsec spatial element in H-band • Multiple LGS (≥ 6), multiple NGS (≥ 3) • Closed loop control of M4 telescope adaptive mirror • Open loop control of high order (≥ 100x100 actuator) Deformable Mirror (DM) in each IFU channel RAS
Technical challenge and proposed mitigation • Open loop control of high order DMs • calibration • ELT LGS • Spot elongation • High accuracy wide field tomography • Real-time control (RTC) • Algorithms • Scale of implementation Laboratory Demonstration: SESAME: working now Staged On-sky Demonstration of SINGLE channel: CANARY: 2010-2012 Goals: * demonstrate MOAO in EAGLE configuration, * verify design models, * develop techniques, e.g., calibration, RTC RAS
Cone Effect LGS Wavefront Sensor (WFS)Spot Elongationdue to sodium layer depth(central LGS) LGS turbulence WORSE for ELTs WORSE for ELTs RAS
CANARY LGS MOAO demo method Key technology: RAYLEIGH LGS (RLGS)(e.g., SOR, WHT, MMT, SOAR, LBT LGS study) • These use pulsed lasers with temporal WFS range gating • to select LGS height and extension (range gate depth) • The Rayleigh LGS Altitude and extension are programmable • They can emulate the spot elongation & cone-effect geometry of aSODIUM LGS on a MUCH LARGER telescope • SO: • 85 km sodium LGS → 8.5km Rayleigh LGS • 10km sodium layer → 1km range gate depth • 42m E-ELT → 4.2m WHT • In principle: can emulatesodium density evolution too RAS
However… • BUT: • This scaling is not perfect • Atmosphere and wavelength are not scaled • There will be additional uncorrected turbulence in demo compared to ELT • Need to reduce LGS separation to emulate ELT meta-pupil overlap at a given altitude • SO NEED: • Concurrent Natural Guide Star (NGS) tomography • Record corrected wavefront (truth sensor) as well as the near-IR image (Point Spread Function) • To check that current MOAO correction is as predicted for current atmosphere RAS
William Herschel Telescope • 4.2m Alt-Az, La Palma • Operational Rayleigh LGS: GLASGrond-laag Laser Adaptieve optiek Systeem (Ground-layer Laser AO System) • 18 W 515nm • Launch System • 35cm telescope above M2 • Safety Infrastructure • No fly zone • Launch permission • Traffic Control • MK clone • MASS/DIMM 20m from WHT • SCIDAR 340m from WHT RAS
GLAS WHT LGS FacilityING - Astron - Durham NAOMI AO System: UKATC-Durham-ING INGRiD imager: ING OASIS IFU: Lyon Variation of closed-loop (●) and open-loop (○) Gaussian fit FWHM versus angular distance from centre of field for a 20s J-band image. Turbulence profile approx 50% at ground, 15% at 4km, and 35% at 16km. LGS altitude of 15km. RAS
WHT Nasmyth(GHRIL) • Large, undedicated Nasmyth enclosure for guest instruments • 2.5 × 1.34 m opt bench • Services RAS
GHRIL NASMYTH RAS
CANARY Demo Stages • Phase A 2010 • 3 × Natural Guide Stars (in 3’ field) open loop control of low order (8 × 8 actuator) Deformable Mirror (DM) • Natural Guide Star Truth Wavefront Sensor, Near-IR imager • Phase B 2011 • Add 4 × LGS open loop control of low order DM • Concurrent NGS tomography maintained • Phase C 2012 • Closed loop LGS/NGS control of low-order DM • Open loop control of high-order DM (up to 32 × 32 actuator) • Full-up EAGLE demo RAS
Phase A: NGS MOAO Science Verification NGS FSM Low-order DM NGS Pickoffs WHT Nasmyth GHRIL Derotator Truth Sensor Figure Sensor Calibration Unit 3 x NGS WFS Phase A : NGS MOAO • Components: • Low-order 8x8 DM • 3 x EMCCD open-loop NGS WFSs • Open-loop optimised Fast Steering Mirror (SPHERE design) • Diagnostic Systems: • 1 x EMCCD closed-loop NGS WFS (Truth Sensor) • High speed DM figure sensor • NIR Imaging camera (loan courtesy ESO) RAS
GLAS BLT Diffractive Optic LGS Rotator GLAS Laser LGS Dichroic NGS FSM NGS Pickoffs WHT Nasmyth GHRIL Derotator LGS Pickoffs Figure Sensor 3 x NGS WFS Low-order DM Calibration Unit LGS FSM Truth Sensor Science Verification 4 x LGS WFS Phase B: Low-order LGS MOAO Phase B: Low-order LGS MOAO • New modules include: • Electronically shuttered LGS WFS CCD (Lincoln Lab) • Modified GLAS launch, LGS dichroic and relay system RAS
Figure Sensor GLAS BLT Diffractive Optic LGS Rotator GLAS Laser MEMS DM LGS Dichroic NGS FSM Low-order DM NGS Pickoffs WHT Nasmyth GHRIL Derotator Calibration Unit LGS Pickoffs 3 x NGS WFS • Phase C: High-order woofer-tweeter LGS MOAO (woofer closed loop) Science Verification Truth Sensor LGS FSM 4 x LGS WFS Phase C: High-order LGS MOAO • Closest resemblance to proposed EAGLE MOAO implementation • Closed-loop low-order DM conjugated to ground layer • Open-loop MEMS DM • SPARTA (ESO VLT) type accelerated Real-Time Computer • NOTE: LOW-ORDER LTAO CAPABILITY RAS
Key Components • NGS WFS • E2V EMCCDs (asterisms with 4 NGS in 3’ needed) • LGS WFS • Lincoln Lab Gated CCDs • Fast Steering Mirror • Surface Sensing SPHERE Design • Low order DM • Adonis (ESO 3.6m) • High order DM • BMM 32 × 32 MEMS – just delivered • Real-time Computer • PC-based with Evolution to ESO SPARTA system Phase A NGS Design: Paris LESIA RAS
“De-Risking” • Figure Sensor (DMC) • High-speed LUPA 300 CMOS detector + FPGA (IAC collab) • Proof of concept trial currently being integrated in Durham • RTC • First version based on working PC-based system • Contract with ONERA/Shaktiware • On-site component tests October 2008 • LGS asterism test: Diffractive Optical Element (Herriot-Watt) • Gated CCD test on-sky • Test Figure Sensor in WHT environment RAS
Phase A Space Envelope At WHT Nasmyth Current Status • NGS main path opto-mechanical concept complete • Alignment/calibration procedures • LGS pickoff and relay optical design complete • 2 simulations running • using YAO run by A. Kellerer • Using Durham AO simulation platform (DASP) by A. Basden • Next: • Comparative simulation using EAGLE design codes • ONERA/Durham • Design Reviews June 2008 • Phase A PDR, B/C CoDR • RTC first contract June 2008 Phase B Optics RAS
PHASE B RAS
Phase C RAS
Funding Status • UK (STFC) • France (various) • EU FP7 Preparatory Fund • EU OPTICON JRA-1 – applied • ESO-led • Includes additional WHT nights • Further STFC support for final phase - applied • Further French funding proposals - to be made Funded, enough for first two phases RAS