Download
1 / 19
200 likes | 683 Views
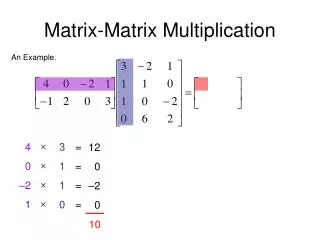
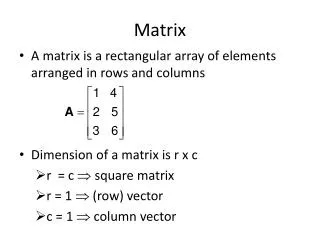
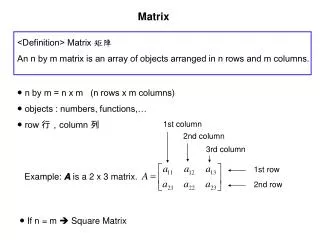
Order Number of row or columns Rank of Matrix: Order of largest non-zero determinant. A matrix whose order exceeds its rank is singular. Matrix. Matrix of Cofactors divided by the determinate. Inverse of a matrix. Cofactor of Matrix Determinate of Matrix We could use any row or any column.

E N D
Order Number of row or columns Rank of Matrix:Order of largest non-zero determinant.A matrix whose order exceeds its rank is singular Matrix Robotics 1Copyright Martin P. Aalund, Ph.D.
Matrix of Cofactors divided by the determinate Inverse of a matrix Robotics 1Copyright Martin P. Aalund, Ph.D.
Cofactor of Matrix Determinate of Matrix We could use any row or any column Cofactors and Determinants Robotics 1Copyright Martin P. Aalund, Ph.D.
Inverse of a diagonal Matrix Inverse of a symmetrical matrix is symmetrical Inverse of an anti-symmetrical matrix is anti-symmetrical Inverse of the product of matrices is equal to the reordered product of the inverses. Normal Matrix Orthogonal Matrix Other Identities Matrices Robotics 1Copyright Martin P. Aalund, Ph.D.
Definitions • Actuator: A motor or transducer that converts energy (Electrical, Hydraulic, or Pneumatic Etc..) into motion. • Transducer: A device for converting one form of energy to another. An example would be a microphone. It converts acoustic energy(Sound) to electrical energy. • A/D: Analog to Digital converter. Converts an analog voltage to a digital value. Used to interface sensors to a computer. Also written (ATOD). • D/A: Digital to Analog converter. Converts a digital value to an analog voltage. Often connected to the input of a control system or amp. Also written DTOA. Robotics 1Copyright Martin P. Aalund, Ph.D.
Repeatability: How well a robot can return to the same point. Accuracy: How well a robot can move to an arbitrary point in space Precision: The smallest increment with which a robot can be positioned. Resolution: Sensor Increment Definitions Continued Robotics 1Copyright Martin P. Aalund, Ph.D.
As upper limits the precision is equal to the resolution and the Accuracy is 1/2 the precision. Most robots repeatability, accuracy and precision changes throughout its workspace. Definitions Continued Robotics 1Copyright Martin P. Aalund, Ph.D.
Type of Robot Actuation • Direct Drive • Geared • Belts, Gears, Harmonic Drives, Cycloidal Cam Robotics 1Copyright Martin P. Aalund, Ph.D.
Motor • Brush DC • Brushes may wear out. Perceived as a reliability issue. Brushes produce dust. • Brushless DC • Require a full H-Bridge and a sensor for comutation • AC Induction • Requi • Stepper • Reluctance Robotics 1Copyright Martin P. Aalund, Ph.D.
Electric Motor Types Robotics 1Copyright Martin P. Aalund, Ph.D.
Electrical Most Popular Hydraulic used mainly in welding and underwater activities. Pneumatics used for gripping and detented motion Type of Actuation Robotics 1Copyright Martin P. Aalund, Ph.D.
Position Sensing • Sense at Joint • Don’t Worry about Deflection or Backlash • Sense at Motor • Low Cost Sensor • Sense at End-Effector • Limited View • Cost Robotics 1Copyright Martin P. Aalund, Ph.D.
Incremental Encoders and Resolvers are Most Popular Sensor Comparison Robotics 1Copyright Martin P. Aalund, Ph.D.
Generally Have two picks up that are 90 degrees out of Phase (A and B) This allows you to determine the direction of rotation and thus count up or down By using the rising and falling edges of both A and B we can get 4 times the number of slots. May have one or more index marks for homing. Encoder Robotics 1Copyright Martin P. Aalund, Ph.D.
Gray Code Vs Binary Gray Code only changes by one bit per transition. At least one sensor per track. 11 11 01 01 01 00 00 10 Absolute Encoder Robotics 1Copyright Martin P. Aalund, Ph.D.
Uses an AC signal to excite the rotor winding. Stator has two windings at 90 degrees to each other. As the rotor turns the coupling to the two windings will change Can have multiple poles, but lose absolute capability. Converters usually are analog and can be expensive, $200 for 14-16 bits. Cosine Reference Sin Resolver Robotics 1Copyright Martin P. Aalund, Ph.D.
Similar to a resolver but made in two planes. The Inductosyn has many pole pairs, 50 + The output will repeat ones for each pole pair. Each cycle can be decoded to 14+ bits Require very precise alignment, and high quality amplifiers. Expensive Analog Encoders offer similar solution at a lower cost. Inductosyn Robotics 1Copyright Martin P. Aalund, Ph.D.
Uses a pattern and a matched diffraction grate to transmit light at different amounts as a function of rotation Optical sensors generate voltages proportional to the light hitting them. These voltages are digitize and used to produce absolute position values for a cycle. Encoders can be designed to produce multiple cycles per revolution.For example a disk can have 2048 cycles and each cycle can be decoded to 10 bits to result in 22 bits of position information. Multiple tracks can be place on a diskOne track with many cycles can be used to obtain fine resolutionOne tack can be used to determine which cycle of the fine track the encoder is in. Similar to an Hour, Minute and second hand on a clock. Requires additional Electronics to decode. LEDs require relatively high power. Analog Encoder. Robotics 1Copyright Martin P. Aalund, Ph.D.
Operate similar to analog encoders. Patterns are placed on the rotor and stator. Rotor and stator can be made of low cost materials Technology similar to printed circuit board fabrication. Capable of very low power operation. This would allow for battery baked operation. Resolution similar to analog encoders and Inductosyns Electronics utilize Digital to Analog converters and DSPs or PLDs. Capacitive and Inductive Sensors Robotics 1Copyright Martin P. Aalund, Ph.D.