Download
1 / 34
340 likes | 480 Views
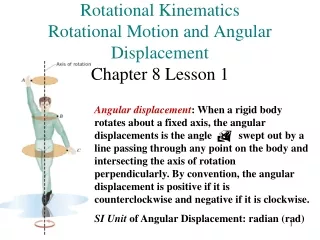
MADRID Measurement Apparatus to Distinguish Rotational and Irrotational Displacement. Rafael Ortiz Graduate student Universidad de Valladolid (Spain). MADRID. Problem to solve Reasons of choosing this option Description of the device First result Future works. Introduction.

E N D
MADRIDMeasurement Apparatus to Distinguish Rotational and Irrotational Displacement Rafael Ortiz Graduate student Universidad de Valladolid (Spain)
MADRID • Problem to solve • Reasons of choosing this option • Description of the device • First result • Future works
Introduction • High accuracy in microsurgery • Vitreoretinal microsurgery MICRON • Neurosurgery LASER MICRON • Involuntary movement of the hand hinder the desired accuracy. • Tremor (6-12 Hz 50μm pp) • Jerk • Drift
Neurosurgery • Surgeon try to burn cancerous tissues from the patient’s brain • If all cancerous cells weren’t not removed, the tumors would grow up again • If healthy cells were burnt, the patient life would be in danger
Neuroarms • Robots with 6 dof, stereo vision • They are able to Working with a specialized set of tools. • They are designed to perform soft tissue manipulation, needle insertion, blunt dissection, suturing, grasping of tissue, cauterizing, cutting, manipulation of a retractor, tool cleaning, suction and irrigation.
But … • Sometimes surgeon remove the laser from the robot to end the work • Other times is hard to program the robot to get the right orientation to burn the tumor • The accuracy of this last operation depend on the tremor of the surgeon
Vitreoretinal microsurgery • Six degrees of freedom • Three rotations • Three translations • The tip ≈ Point in the space ( 3 dof ) ↓↓↓ ASAP
Neurosurgery • Four degrees of freedom • Two rotations • Two translations • Laser tracking ↓↓↓
Options to solve the problem • CCD camera • Position sensing detector
CCD camera • High speed ( 100 fps ) • High accuracy ↔ High resolution • Precision depend on the distance from the screen • Very expensive system and very big system
PSD • Small (42mm x 29 mm) • Easy to use (output proportional to position) • -3dB Bandwidth: 257 kHz • Resolution (up to 0.25 μm) • Linear (±1full scale) • Not need to focus
- æ ö x x a = ç ÷ 1 2 Arc tan - a d è ø - æ ö y y b = ç ÷ 1 2 tan Arc - a d è ø Calculation of two angles
( ) ( ) = - + + a g x 1 a b c tan x ( ) ( ) = - + + b g y 1 a b c tan y ( ) ( ) = - + + a g x 2 d b c tan x ( ) ( ) = - + + b g y 2 d b c tan y Calculation of displacement
General Scheme Band pass Opt filter PSD#2 Beam splitter AD card Laser Ch7 Laser Ambient light Alpha Beta Gx Gy PSD#1 X1 Transform microns into angles and positions Subtract Offset
Hardware Power Inverse Bias Position Sensing Detector #1 DATA output Band pass Optical filter Standard Cube Beam splitter Position Sensing Detector #2
Band pass optical filter • Benefit: eliminate most of the ambient light • Type: 10LF20-670 • C. Wavelength: 667.3nm • FWHM: 19.4nm • P. Transmission: 53.1% 10LF20-670, Newport, Irvine, CA
Standard Cube Beamsplitter • BS CUBE STANDARD 12.5MM TS • Size: 12.5mm x 12.5mm • Reflection : 50 % • Transmission : 50 % NT45-111, Edmund optics, Barrington, NJ
Position Sensing Detector • 1 cm2 square PSD & associated amplifier circuit. • Voltage analog of the X,Y and spot intensity DL 100- 7PCBA ,Pacific Silicon Sensor Inc. ,Westlake Village, CA
First Result Only translation: • Calibration & cross psd calibration (full range) • Performance test (small steps) Only angle: • Calibration angle alpha • Calibration angle beta Angle and translation: • Performance test Real tremor
Before calibration • Steps of 0.04 inch or 1mm o target + reading
After calibration o target + reading
Cross psd calibration Max error x = 20.08 μm Max error y = 18.38 μm Range x = 4000 μm Range y = 4000 μm Linearity x = 0.5% Linearity y = 0.46% + psd #2 + psd #1
Performance test • Step of 2 mil or 50 micron Max error x = 5.0918 μm Max error y = 5.7116 μm Range x = 1016 μm Range y = 1007 μm Linearity x = 0.50% Linearity y = 0.57%
Only angles Wheel to reach different orientation of angle BETA Wheel to reach different orientation of angle ALPHA
Angle (Alpha) Range =2.5653° Maximum Error 0.0268 ° Linearity =1.04%
Angle (Beta) Range =2.2526° Maximum Error 0.0517° Linearity =2.29%
Sensors noise at zero motion-angle Standard derivation of error in alpha Std alpha 0.0022° ≈ 8’’ Standard derivation of error in beta Std alpha 0.0022° ≈ 8’’
Sensors noise at zero motion-translation Standard derivation of error in x translation Std Gx error 4.1876 micron Standard derivation of error in alpha Std Gy error 4.0152 micron
Future works • Increase the workspace (bigger psds) • Test other laser diode (reduce the noise) • Determinate the distance between the filter and the laser in real time ( in study ) • Track surgeon’s tremor