Download
1 / 40
400 likes | 649 Views
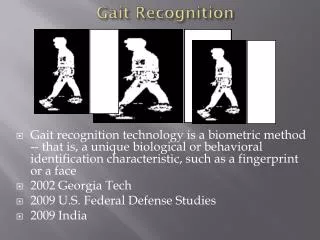
BIOMETRIC GAIT RECOGNITION CMPE 58Z INTRODUCTION TO BIOMETRICS TERM PROJECT. MUSTAFA OZAN ÖZEN PINAR SAĞLAM LEVENT ÜNVER MEHMET YILMAZ. MOTIVATION. Gait : Particular way or manner of moving on foot . Gait Recognition : Identifying people with respect to their gait features .

E N D
BIOMETRIC GAIT RECOGNITIONCMPE 58Z INTRODUCTION TO BIOMETRICS TERMPROJECT MUSTAFA OZAN ÖZENPINAR SAĞLAM LEVENT ÜNVER MEHMET YILMAZ
MOTIVATION Gait: Particularwayormanner of moving on foot. GaitRecognition: Identifyingpeoplewithrespecttotheirgaitfeatures. Advantages: Can be used at distance Can be used at lowresolution Acceptablebypeople
OUTLINE • General GaitRecognitionApproaches • CASIA Database • Theapproacheswecurrentlyused: • “AveragedSillhouettes” Approach. • “AbsoluteJointPositions” Approach. • “Abdelkader’sEigengait” Approach. • “Whatif it happens?” Approach.
General GaitRecognitionApproaches Gait Recognition Approaches MV-Based FS-Based WS-Based Silhouette-Based Model-Based
CASIA GaitDatabase • Inthisproject, CASIA GaitDataBaseA is used • CASIA GaitDataBase: • Has 20 differentpersons data. Eachperson has 12 differentsillhouettegait data set. But weonlyused 2 or 4 dataset (fromrighttoleftgait data). • Inotherwords, therewereone test andonetraining data set foreachperson. Each data set consists of max. 75, min. 37 frames
“AveragedSilhouettes” Appraoch • Silhouette Extraction • Gait Cycle Calculation • Averaged Silhouette Respresentation • Similarity Computation • Results and Discusion
SilhouetteExtraction • GMM to extract silhouettes • Unable to download the database • Sample silhouettes from CASIA Database
GaitCycleCalculation • Problem in Gait Cycle Calculation • Can not estimate gait cycle • What to do?????
SimilarityComputation • Calculate Euclidean Distance • Form the Similarity Matrix
ResultsAndDiscussion • EER = 58.9% • Closed Set Identification Rate = 73.68% • IndividualSilhouetteFrames = ~73% • AveragedSilhouette (Frompaper) = ~79% • Low EER => Lowqualitysilhouettes • Not sobadClosed Set Identification Rate
AbsoluteJointPositions • In the case of this project, the feature points are the position of the joints. • PCA is applied to these feature points and the feature size is reduced. • Then, spatio temporal correlation is used for classifying.
AbsoluteJointPositions • Absolute joint positions – the physical positions of each joint in each frame can be used as a basis for gait signature. • 8 absolute joint positions of each frame are used as feature points.
Extracting Absolute Joint Positions • To extract absolute joint positions, the corresponding positions are clicked in each frame.
Layout of jointpositionfeaturematrix & featurevector • Feature Matrix • FeatureVector
Principle Component Analysis • A person is identified by one feature vector. • After PCA, we projected feature vector into a feature space which gives the best level of recognition.
SpatioTemporalCorrelation • The next step is to perform the recognition by pattern classification. • Algorithm: • Each element of the class cluster one is compared withthe other class, and the distance is calculated. • Thetotal distance between all corresponding class elements are summed and a measure of thedistance of the two classes is calculated. • The training class which has the smallest distancefrom the query cluster is chosen to be the class (i.e. person) which the query belongs to.
Discussion • Thisprojectrecognise 7 person of 20 people. • Restrictions: • Thedatasetthatwehaveworked on is not qualified.
Discussion • Restrictions: 2. Wedon’thaveenough data fortrainingand test set. 3. Anyotheradvancedclassificationmethods can be appliedratherthanspatiotemporalcorrelation
Abdelkader’sEigengaitApproach • Abdelkader’s eigengait approach of gait recognition is also a silhouette – based technique. • Thistechniquecreates self similaritymatricesfromtheimagesequences. • Aftercreating self similaritymatrices, therows of thesematricesareappendedto form a singlefeaturevector. • Allthefeaturevectorsaregatheredtogetherand PCA is appliedtoprojectthe data into a newfeaturespacewhich is calledEigengait. • Finally k-NN is appliedtotheEigengait data forclassification.
Abdelkader’sEigengaitApproach • Self SimilarityMatricesarecreatedbycomparingthesimilarity of pixelintensitiesover N frames. • Ot1 and Ot2 areextractedimages at time t1 and t2 respectively. • x and y valuesarerepresentingthepixels of theimage. • Bt1 is the minimum boundingboxsurroundingtheextractedobject.
Abdelkader’sEigengaitApproach Self Similarity Plot
Abdelkader’sEigengaitApproach Self Similarity Matrice Characteristics
Abdelkader’sEigengaitApproach • Calculate the k – nearest neighbor to the unclassified feature vector in the training set. • Determine the class which has the most points in the k selected points.
Discussion • SOTON Database will be used for the next experiments. (normalized, not noisy about 10 instances for each class)
Discussion • Abdelkader’s Eigengait Approach has % 25 identification rate on CASIA Database. • The rate is very low because the dataset is not sufficient for Eigengait approach. • We used 1-NN classifier because we can create only one self similarity matrix for each class. • Data is not normalized according to the phases and cycles which is very essential for sel similarity matrices.
Ozan’s “What if it happens?” approach • 2 ideas coming together • Using skeletons • Using Motion history images
IF A picture is worth a thousand words ...
A little bit of results? Pure Skeleton Skeleton + time Pure Full Image Full image + time
REFERENCES: • “AverageSillhouettes” Approach: • “Simplest Representation Yet for Gait Recognition: Averaged Silhouette” ZongyiLiuandSudeep Sarkar • “AbsoluteJointPositions” Approach: • “GaitRecognitionusingAbsoluteJointPositions” Mark RuaneDawson • “Abdelkader’sEigengait” Approach • “Motion-Based Recognition of People in EigenGait Space” Chiraz Ben Abdelkader