Download
1 / 31
310 likes | 438 Views
Deadlock. Thread T 1 b1:= allocate(); b2:= allocate(); …… release(b1); release(b2);. Thread T 2 b1:= allocate(); b2:= allocate(); …… release(b1); release(b2);. Stepping on each other’s feet - I. A serial execution is ok, but interdigitation can cause deadlock!.

E N D
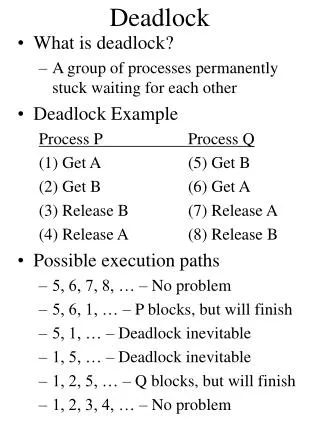
Thread T1 b1:= allocate(); b2:= allocate(); …… release(b1); release(b2); Thread T2 b1:= allocate(); b2:= allocate(); …… release(b1); release(b2); Stepping on each other’s feet - I A serial execution is ok, but interdigitation can cause deadlock!
Stepping on each other’s feet - IIThe TENEX case • If a process requests all systems buffers, operator console tries to print an error message • To do so • lock the console • request a buffer DUH!
Thread T1 open(f1, write); open(f2, write); …… close(f1,f2); Thread T2 open(f2, write); open(f1, write); …… close(f1,f2); Stepping on each other’s feet - III A serial execution is ok, but interdigitation can cause deadlock!
Issues • How can we tell if a system is deadlocked? • How can a deadlocked system recover? • How can deadlocks be prevented in the first place?
Model • A set of resources • e.g. files, buffers, semaphores? • System is defined by: • a set of states • each state represents the allocation status of the resources • a set of processes • each process pi can request, acquire, release resources • each pi can be described by the set of state transitions it can generate (pi is a partial function from to 2 )
Transitions • If pi can change the state of the system from 1 to 2 we write 1 i 2 • We write a * b if b can be reached from a, i.e. if either: • a = b • pi : a i b • c , pi : a i c and c * b
Key Definitions Blocked: pi is blocked in a if b : a i b Deadlocked:pi is deadlocked in a if b : a * b , pi is blocked in b Deadlock state:a is a deadlock state if pi : pi is deadlocked in a Safe state: a is a safe state if b : a * b: b is not a deadlock state
Example I 1 1 = {1,2, 3, 4, 5} = {p1, p2} p1 : { (2, {3}) , (4, {5}) , (3, {4}) } p2 : { (2, {1}) , (3, {2}) , (5, {4}) } 2 1 1 2 3 4 5 2 2 • 1 : p1 deadlocked, p2 deadlocked: deadlock state • 2 : not safe (1 deadlocked), not deadlock • 3: not safe, not deadlock • 4: p2 blocked, safe state • 5: p2 blocked, safe state
1 1 2 2 1 2 Example 2 File allocation example from before: 1 – , – 1 , – 1 , 1 2 – , 2 1 , 2 No safe states One deadlock state 2 , 2
Necessary Conditions for Deadlock • Mutual exclusion • Hold and Wait • No preemption • Circular waiting
How to deal with deadlock Two basic approaches: • detect deadlock and abort (breaks no-preemption) • prevent deadlock (breaks one of the other conditions)
Reusable Resource Graphs Direct bipartite graphs • process nodes are circles • resource nodes are squares • single resources as circles within the corresponding resource node square • tj = total number of resources at resource node rj • |(a,b)| = number of edges from a to b Two requirements: • ∑i |(rj , pi)| ≤ tj (can’t allocate more than available) • i,j : |(pi ,rj)| + |(rj , pi)| ≤ tj (no stupid deadlocks)
Examples r Requesting buffers p1 p2 r1 Allocating files p2 p1 r2
Evolving the Resource Graph A resource graph changes as the state of the system changes: • pi requests rj • pi must have no outstanding requests • pi may request multiple units (say ui) • add ui edges from pi to rj • acquisition • pi must have outstanding requests on rj, and all such requests must be satisfiable • reverse the direction of all edges • release • pi must have no outstanding requests • pi may release any nonempty set of resources • erase the appropriate subset of edges from rj to pi
p1 p1 p1 p1 p2 p2 p2 p2 Example r p1 p1 p1 Release Acquisition Request
Deadlock Detection • Deadlock implies that there is no sequence of state transitions that would allow processes to make progress • Then, as long as there exists one sequence of actions through which some process can make progress, there is no deadlock IDEA: • Simulate the most favorable execution of each unblocked process. If that execution exibits deadlock, all will • Simulate by reducing resource graph
Reducing the resource graph A process pi is blocked if |(pi , rj)| + ∑k |(rj , pk)| > tj for all rj Reduction Step • Find unblocked pi which is not isolated • Erase all edges incident on pi : this is equivalent to acquiring and releasing all pi’s resources • When there is no such pi, the graph is irreducible • An irreducible graph that contains no edges is completely reducible
p1 p1 r1 r2 r1 r2 p2 p2 p1 r1 r2 p2 Example Reduce by p1 p2is blocked Reduce by p2 We obtained a fully reducible graph!
Deadlock Theorem Theorem A resource graph represents a deadlock state if and only if it is not completely reducible. Is this really useful? Yes, because, fortunately, the order in which reductions are performed does not affect the final outcome of the reduction process!
p1 p2 Observations: 1 • If deadlock, then cycle in resource graph but the opposite is not true! The resource node had some of its resources non allocated: what if all resources had been allocated?
p1 NO p2 p3 Observations: 2 A graph is expedient if all of its resources have been allocated. Is a cycle in an expedient graph a sufficient condition for deadlock?
Knots A knotis a set of nodes that are mutually reachable from each other, and no other node is reachable from them. a a b b e e c c d d
Observations: 3 • If expedient + knot, then deadlock but not necessary! r2 p3 p1 Expedient, no knot, but deadlock! p2 r1
Observations: 4 If resources are single unit, (j : tj= 1)then deadlock iff cycle
OK, we detected the deadlock:then, what? • Select a victim and either • terminate the victim • costly • how is the victim selected? • preempt its resources • rollback • starvation
Deadlock Prevention - 1 Must make sure that at least one of the 4 necessary conditions does not hold Mutual Exclusion • difficult to avoid: no collaboration! • sometime possible (read-only files) Hold and Wait • Force each process to allocate all resources at the beginning • Allow a process to request resources only if it has none • low resource utilization • possible starvation for processes asking popular resources
Deadlock Prevention - 2 No preemption • preempt all resources held while waiting on a resource • when requesting for a resource: • if it is available, allocate it • if it is not available, but it is held by another process that is waiting, preempt the resource Circular wait • impose a total order on all resource types • require each process to request resources in strictly increasing order
Deadlock Avoidance Determine whether, by allowing allocation, we could get a deadlock, i.e. check if by allowing allocation the system could enter a state that is not safe Simple way to do it: have each process declare the maximum number of resources of each type that it may need
Claims Graph Claim graph: Resource graphs that also contains edges that represent potential requests (each process needs to specify max claim to each resource) p1 p1 p1 Not completely reducible (no deadlock though (yet)) Still completely reducible r p1 p2 p2 p2 p2 Requests one unit Requests one unit
Variables: available[i]: units of ri not allocated c[a,i]: max claim of pa on ri alloc[a,i]: number of units of ri allocated to pa need[a,i]: number of potential requests: c[a,i] - alloc[a,i] finish[i]: one entry per process, true if process can finish work[i]: one entry per process ----------- Let pa attempt to allocate request units of ri if request > need[a,i] {error}; if request > available[i] {wait}; available[i] := available[i] - request; alloc[a,i] := alloc[a,i] + request; need[a,i] := need[a,i] - request; if (not safe()) {undo request and wait}; safe() work[i] := available[i]; while ( u: not finish[u] and (need(u,i) ≤ work[i])) { work[i] := work[i]+alloc[u]; finish[u]:= true; } safe := u: finish[u] Banker’s Algorithm (Dijkstra & Habermann)