Download
1 / 21
210 likes | 416 Views
Software development for 4 legged robot soccer competition. Zheng Qianyi, Robot and Intelligent System Lab, Tongji University. Robot and Intelligent System lab. Research fields – Mobile robot, Multi-agent system, Machine learning, Field Bus, and Embedded system etc.

E N D
Software development for 4 legged robot soccer competition Zheng Qianyi, Robot and Intelligent System Lab, Tongji University
Robot and Intelligent System lab • Research fields– Mobile robot, Multi-agent system, Machine learning, Field Bus, and Embedded system etc. • Members – Prof. Dr. Chen Qijun (leader), Associate Prof. Zhu Jin, Dr. Zhao Xia, Dr. Zhang Wei, 29 graduate students.
Outline • What is Robocup? • Hardware and Software environment of the robot • Software architecture of TJ-Ark • Actuator module • Conclusion and Future work
What is Robocup? • Robocup An international joint project to stimulate research in AI, robotics, and related fields. Aiming at innovations to be applied for socially significant problems and Industries. The ultimate goal is to develop a team of humanoid robots that can win against the official human world soccer champion team until 2050. • Four-legged League One of the Robocup soccer leagues. number of robots : 4 game field : 6 m * 4 m hardware : AIBO robot, provided by Sony corporation software : the key to win the game.
Hardware of the robot • MIPS RISC CPU • 32MB DRAM • Aperios operating system : object-oriented, real-time and multi-tasking. • Memory stick • Joints : 21 joints in total • Output devices : lights, speaker • Input devices : Color Camera, Stereo microphones, Sensors
Software environment of the robot • OPEN-R SDK includes OPEN-R API library, relative documents, and some samples. • OPEN-R standard interface to robot hardware. Characteristics : - - concurrently running “objects” - software modules - - inter-object communication connections specified in configuration file. - - Networking support: TCP/IP protocol stack over Wireless LAN. - - Cross-development environment using patched version of gcc running under linux and cygwin.
Software modules/Objects • Actuator : handles the locomotion for the robot. • Vision : helps robot recognize the ball, the goals, and the beacons in the field. • Wireless : handles communication among the robots in the team. • Localization : gets the positions of the important objects in the field. • Behavior : decides what to do next according to the information received.
Actuator Module • Importance If robot can chase down the ball before competitors, and its kick actions are more accurately, the chance to win would be great. So you can see that Actuator module has an important role in the whole software architecture. • Can be divided into three categories: walking action: make a omni-directional, flexible walk head action: turn robot’s head around to find ball, track ball and look beacons to help localization. fixed actions: various kick actions, such as chest push, left kick, right kick, kick by head etc.
Walking action • Gait – moving order of legs. • Conclusion: crawl is the most stable, but too slow. Pace gait is unstable. Then we chose trot gait to use in competition.
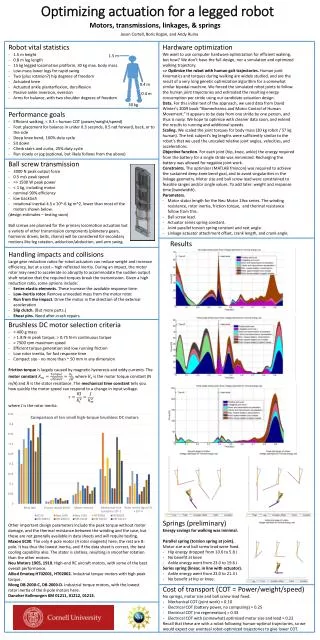
Walking action • Parameterized walk • Walk parameters: walk type – decides the shape of robot’s foot locus forward, left, turnCCW – decide walk distance of robot per step. PG – decides the moving speed of robot’s foots around foot locus. hF、hB、hdF、hbF、ffO、fsO、bfO、bsO – decide robot’s stance together. the meanings of the 8 stance parameters are just like the following figure shows.
Following work • Decide the shape and size of foot locus according to these parameters received from Behavior module. • Use inverse kinematics on robot’s leg model to calculate joints’ angles of robot’s legs. • Finally, send these angle values to robot’s hardware interface to drive every joint’s motor moves.
Conclusion • Walking speed: forward speed can reach to about 40 cm/s. • Sight distance: almost field length if the lighting condition is good. • Localization precision: error is about 20 cm. Successfully achieved legged robot soccer competition in RoboCup2006.
Future work • Improve walking speed in all directions. • Develop the ability of recognizing other robots. • Design the strategy to avoid obstacles and then shoot.
The End. Thank you for listening!