Download
1 / 15
150 likes | 318 Views
Pablo Arbel´aez 1 , Bharath Hariharan 1 , Chunhui Gu 1,2 , Saurabh Gupta 1 , Lubomir Bourdev 1,3 ,† and Jitendra Malik 1 1 University of California, Berkeley - Berkeley, CA 94720 2 Google Inc., 1600 Amphitheatre Pkwy, Mountain View, CA 94043

E N D
Pablo Arbel´aez1, BharathHariharan1, ChunhuiGu1,2, SaurabhGupta1, Lubomir Bourdev1,3,† and JitendraMalik1 1University of California, Berkeley - Berkeley, CA 94720 2Google Inc., 1600 Amphitheatre Pkwy, Mountain View, CA 94043 3Facebook, 1601 Willow Rd, Menlo Park, CA 94025 Semantic Segmentation using Regions and Parts
Introduction Related Work Region Generation Region Representation Region Scoring Pixel Classification Experiments Outline
Bottom-up region cues and top-down part detectors provide complementary information for recognizing articulated objects. Introduction
CRF Approaches • Refining top-down detections • Scoring bottom-up region hypotheses Related Work
Uses bottom-up regions as object candidates Generate object candidates building on the segmentation method of [4] Compute UCMs at three resolutions of the input image Region Generation [4] P. Arbelaez, M. Maire, C. Fowlkes, and J. Malik. Contour detection and hierarchical image segmentation. IEEE Trans. on PAMI, 2011.
Part Compatibility Features • Part Activations • use the poselet framework introduced in [8, 7] • use pre-trained models and masks from [9] • Part-Based Region Ranking |I | : the total area of the image α = (α1, ..., α6) ∈ N6 Region Representation [7] L. Bourdev, S. Maji, T. Brox, and J. Malik. Detecting people using mutually consistent poselet activations. In Proc. ECCV, 2010. [8] L. Bourdev and J. Malik. Poselets: Body part detectors trained using 3d human pose annotations. In Proc. ICCV, 2009. [9] T. Brox, L. Bourdev, S. Maji, and J. Malik. Object segmentation by alignment of poselet activations to image contours. In Proc. CVPR, 2011
Part Compatibility Features • Part-Based Region Ranking P= {P1, ..., PA} Region Representation
Global Appearance Features • a set of first-order appearance cues defined on the region support • Shape, Color, Texture • Semantic Contours Features • 4 region features per semantic contour map • Generic geometrical properties • 16 generic geometric properties for each region Region Representation
Multi-Class Features • the three high-level descriptor types are category-specific and the low-level geometric properties are shared Region Representation
Predict the probability of belonging to each category of interest for each object candidate After classification, each region is assigned a score for all the categories of interest Region Scoring
Train a final set of classifiers that operate on pixels rather than on regions • average • maximum • non-max suppression Pixel Classification
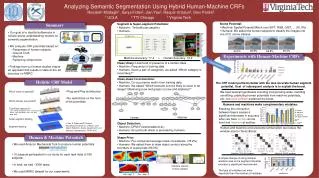
Control Experiments Experiments Calibration of multiple detectors through pixel classification
Test set performance Experiments